
Volumetric measurements of an adverse-pressure-gradient turbulent boundary layer using single-camera light-field PIV
-
摘要: 作为一种新兴的体三维粒子图像测速技术,光场单相机三维粒子图像测速技术(Single-Camera Light-Field Particle Image Velocimetry,LF-PIV)能够仅用单个相机获得三维速度场,其结果已在许多复杂三维流动测量中得到验证。LF-PIV的优势主要在于其紧凑简便的硬件设备以及对光学窗口较宽松的要求。应用LF-PIV技术对一个自相似的逆压湍流边界层(Adverse Pressure Gradient Turbulent Boundary Layer,APG-TBL)进行测量,该实验在澳大利亚莫纳什大学(Monash University)航空航天与燃烧湍流研究实验室(Laboratory for Turbulence Research in Aerospace and Combustion,LTRAC)水洞中完成。实验对远、近壁面测量所得到的各600组瞬态三维流场数据进行分析验证,并与相同工况下的2D-PIV实验结果对比,证明基于DRT-MART重构技术的LF-PIV能够进行基本的湍流边界层测量。Abstract: As a novel volumetric particle image velocimetry technique, Single-Camera Light-Field PIV (LF-PIV) is able to reconstruct three-dimensional flow fields using a single camera. The merits of LF-PIV lie in its concise hardware setup and minimum optical access requirement. Its capability has been proved in many experimental investigations. In this study, LF-PIV is used to measure a self-similar Adverse Pressure Gradient Turbulent Boundary Layer (APG-TBL). Experiments are performed in a large water tunnel at the Laboratory for Turbulence Research in Aerospace and Combustion (LTRAC), Monash University. Twenty independent batches of light-field PIV images are captured for both inner and outer flow, each consisting of 250 instantaneous image pairs. Instantaneous 3D velocity fields are reconstructed with the GPU accelerated DRT-MART and 3D cross-correlation methods and compared with two-dimensional PIV (2D-PIV) results. Preliminary results show that though limited by the experiment conditions and PIV algorithms developed in 2016, similar accuracies to 2D-PIV are achieved near and above the boundary layer. With the volumetric calibration method that compensates optical distortions caused by lens defect and misalignment between the Microlens Array (MLA) and image sensor, the resolution of LF-PIV is greatly improved.
-
0 引言
近年来,激光粒子图像测速技术(Particle Image Velocimetry, PIV)已经从二维流场测量发展到三维流场(3D3C)测量。单相机光场粒子图像测速技术(LF-PIV)作为一种新的体三维流场测量技术发展迅速[1-4],已成功应用于许多复杂流场测量领域,得到了较好的三维流场结果[5-7]。在满足相对高的相机CCD/CMOS和微透镜阵列(Microlens Array,MLA)分辨率的情况下,LF-PIV以更简单的硬件调试操作和更少的光学窗口达到了与层析PIV(Tomographic Particle Image Velocimetry, Tomo-PIV)相近的精度[8-9]。
逆压梯度作用下的边界层流动是工程应用中常见的基础问题,如船体、机翼、叶轮机叶片等表面的边界层情况,有着重要的工程背景。在逆压梯度作用下,边界层失稳转捩,发生流动分离现象,使得阻力增加。由于其压力梯度沿流向非线性变化,对该问题的研究主要采用物理实验和计算仿真的方法。
本文开展了LF-PIV技术在逆压梯度湍流边界层(APG-TBL)的测量研究,旨在通过对湍流边界层的三维流场测量实验,解决LF-PIV技术在较大水洞环境下的相机布局、体光源引入、示踪粒子投放和现场标定方法等工程应用技术难点,研究数据处理方法。并将实验结果同已有的相同工况下二维PIV (2D-PIV)数据[10-11]进行对比,给出LF-PIV技术在湍流边界层测量分辨率方面的确定描述。在澳大利亚莫纳什大学(Monash University)航空航天与燃烧湍流研究实验室(LTRAC)水洞中,应用LF-PIV技术对负压力梯度湍流边界层进行测量实验研究,获得三维空间边界层流场数据,并与2D-PIV数据进行分析对比。
1 实验技术与设备
1.1 LF-PIV技术简介
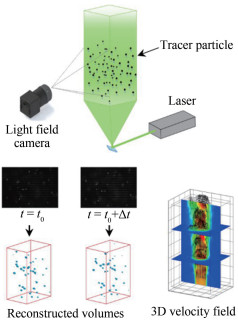
作为一种新型的三维速度场(3D3C)测量技术,LF-PIV技术采用一定厚度的体光源照射三维待测量体区域,通过一台封装有微透镜阵列的精密光场相机拍摄示踪粒子图像[3-4]。图 1为LF-PIV的工作原理示意图。待测体区域中粒子散射光线在间隔Δt的2个时刻被光场相机记录下来,形成2张包含粒子三维空间位置信息的光场图片。通过DRT-MART算法重构得到粒子在三维空间的分布结果,进而由三维互相关算法得到粒子在该时刻的速度分布。
1.2 实验设备及方法
1.2.1 实验设备
实验在澳大利亚莫纳什大学LTRAC实验室水洞[10]中进行。该水洞主要由整流段、收缩段、测试段组成,其中测试段尺寸为0.5m×0.5m×5.5m,分为5部分。测试段中安装有0.5m长的铝制收缩段和5.0m长的玻璃顶板,将横截面积压缩到约500mm×172mm。玻璃顶板下安装有一块可调节的柔性聚碳酸酯塑料板,该板可通过18个螺纹杆来调整各部分位置,从而在第四测试段的第四部分发展出所需要的自相似逆压梯度边界层[10]。实验中,该水洞被调整到与Atkinson等之前所做的2D-PIV实验工作[11]相同的工况,以方便进行对比分析。
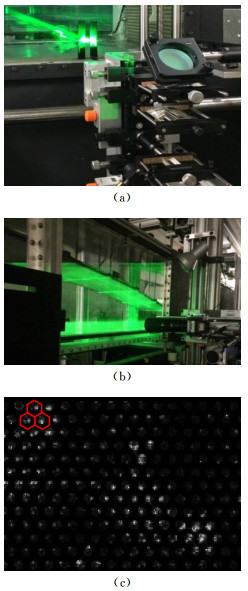
图 2为实验水洞和测量示意图。如图所示,光场相机被放置在测试段第四部分,距离水洞入口3.68m处,聚焦在水洞的中心平面上。实验水洞均匀散布着直径为11μm的中性浮力空心玻璃珠(Potters)作为示踪粒子。测试区域位于水洞中心底部,大小为61.3×12.8×10.0mm3,利用双曝光Nd:YAG激光(Gemini PIV 15, 90mJ/pulse, 532mm)均匀照射。如图 3(a)所示,实验中采用包含柱面镜的透镜组将激光从固定在水洞一端的狭缝射入,从而得到一定厚度的均匀体光源照明。使用基于IMPERX相机(B6640, 29M,2Hz)自主设计封装的光场相机[9, 12],配合尼康200mm的微距镜头,与激光同步拍摄得到粒子图像。
![]() 图 2 LTRAC实验水洞及LF-PIV对上下两层边界层测量实验示意图Fig. 2 Schematic of the LTRAC water tunnel and the LF-PIV experimental setup of the inner and outer layer measurements
图 2 LTRAC实验水洞及LF-PIV对上下两层边界层测量实验示意图Fig. 2 Schematic of the LTRAC water tunnel and the LF-PIV experimental setup of the inner and outer layer measurements![]() 图 3 (a) 激光光路实物图; (b)相机设置实物图; (c)粒子图像局部放大图。其中左上角红色六边形框表示微透镜的排布方式,框内为单个微透镜所成的像Fig. 3 (a) experimental setup of the laser path; (b) experimental setup of the LF-PIV system; (c) partially magnified particle image. The red hexagonal frame in the upper left corner indicates the arrangement of the micro lenses array, and the inside of the frame is the subimage formed by a single microlens
图 3 (a) 激光光路实物图; (b)相机设置实物图; (c)粒子图像局部放大图。其中左上角红色六边形框表示微透镜的排布方式,框内为单个微透镜所成的像Fig. 3 (a) experimental setup of the laser path; (b) experimental setup of the LF-PIV system; (c) partially magnified particle image. The red hexagonal frame in the upper left corner indicates the arrangement of the micro lenses array, and the inside of the frame is the subimage formed by a single microlens1.2.2 实验方法
理论分析[3]表明:为了实现LF-PIV技术最优的测量分辨率,光场相机的放大系数应尽量接近1。实验中,应用此结论的同时也导致了相机拍摄不能一次性覆盖整个边界层。因此,为了测量到完整的边界层,整个实验被分成2组:近壁面组和远壁面组。如图 2和3(b)所示,在拍摄完近壁面部分后,将光场相机垂直上移25mm进行远壁面组的拍摄。相机每秒钟拍摄一对粒子图像对。整个实验对远、近壁面组各拍摄了5000对粒子图像对。为保证数据采集满足统计无关性并考虑磁盘容量的限制,远、近壁面组在实际拍摄中各自分成了20组独立采集组,每组含有250对粒子图像对。
2 数据处理
2.1 重构及互相关算法
通过基于乘积代数重建技术(MART)及密集光线追踪的权重系数计算方法的光场粒子重构算法[8-9](Dense Ray Tracing-Based MART, DRT-MART),三维粒子空间分布图可以从光场粒子图像中重构得到。其基本步骤为:首先使用密集光线追踪方法确定非零值的体素(Voxel)影响到的每个像素的权重系数,然后根据记录的像素值和权重系数,利用式(1)所表示的MART算法迭代计算粒子体素值,整个过程与Tomo-PIV中的MLOS算法[13]类似。

(1) 式中:E(Xj, Yj, Zj)为第j个体素的值;I(xi, yi)为第i个像素的值,可以从记录的光场图像中读取;wi, j为权重系数,表示第i个像素接受来自于第j个体素光线强度的百分比。经过数值仿真检验,DRT-MART重构算法在满足较高像素和较多微透镜的情况下,可以达到与Tomo-PIV相同的重构精度,详细内容见施圣贤等人之前的工作[8-9]。
实验中,原始粒子图像对通过DRT-MART算法在体素像素比为3:3:10(x, y, z方向)的条件下重构得到三维粒子空间分布对。每个重构对的重构体素区域大小为733×2200×182voxels,分辨率为0.0165×0.0165×0.055mm3/voxels。之后利用三维互相关算法[14]可以得到三维瞬态速度场,其中互相关算法的窗口重叠率为50%,第一重网格大小为256×256×64voxels,第二重网格大小为128×128×32voxels。原始速度场结果利用中值滤波和线性插值的方法剔除错误速度矢量并填补(滤除率约为0.05%~0.10%),最后得到的单个瞬态三维速度场的分辨率为0.558 ×0.637×0.526mm3/vector,包含有23465(19×65×19)个速度矢量。
由于计算量巨大,本文中包括重构和互相关在内的算法由GPU进行加速。通过利用GPU并行计算方法,6张GeForce 1080Ti显卡可以显著提高计算效率。每张重构得到的三维粒子分布图约耗时150min,每个由三维互相关得到的瞬态速度场约耗时15min。近、远壁面组各得到了600对瞬态速度场。
2.2 数据统计处理及质量检验
对LF-PIV来说,相比于水洞尺度,整个测量区域在沿主流流向方向上的切面内由不同空间位置产生的流场测量变化可以忽略不计。同时,相机对流场进行连续采样,其采样频率为1Hz,确保获得的瞬态场之间满足统计无关。因此,基于湍流流动在统计上的各向同性,不同瞬态场在y轴上不同高度处的所有数据,即垂直于水洞下壁面不同高度处的xoz平面上(见图 4)的所有数据,在统计上可被视为对y轴上同一点的多次采样。因而,沿主流方向平均所有三维速度场,每个y轴上不同高度处的统计点约有216600个样本数据。针对每个统计点的样本进行3-Sigma检验,滤除错误数据,可以得到较高质量的数据。各个统计点的滤除率约为0.5%~1.0%。图 4所示为经过3-Sigma检验滤除错误数据后,将远、近壁面组各600对瞬态速度场得到的平均结果拼合得到的时均流场。
![]() 图 4 LF-PIV对湍流边界层测量的实验结果,图示结果为时均流场,将远、近壁面两组测量结果进行拼合后的展示Fig. 4 Overview of averaged volumetric velocity field of APG-TBL measured by LF-PIV and assembled with inner and outer layer data. The outer flow is in the positive x-direction, and the wall lies here on the right-hand side
图 4 LF-PIV对湍流边界层测量的实验结果,图示结果为时均流场,将远、近壁面两组测量结果进行拼合后的展示Fig. 4 Overview of averaged volumetric velocity field of APG-TBL measured by LF-PIV and assembled with inner and outer layer data. The outer flow is in the positive x-direction, and the wall lies here on the right-hand side3 LF-PIV与2D-PIV结果的对比
如前文所述,本文的主要目的之一是为了获得LF-PIV在湍流边界层测量中的分辨率。通过600个瞬态速度场得到的速度分布与在相同实验设备和条件下的2D-PIV实验结果对比,并应用2.2节中提到的统计处理方法,可以得到与2D-PIV相对应的主流方向速度分量的分布曲线及雷诺应力分布曲线。对分布曲线进一步分析, 可以得到LF-PIV对湍流边界层的测量效果。通过逐步增加处理得到的瞬态速度场的数量来观察数据分析结果与2D-PIV的对比。当数据量达到约600个瞬态速度场时,数据分析结果基本收敛。因此,以下对远、近壁面组的数据分析均为基于各自600个瞬态速度场进行的。
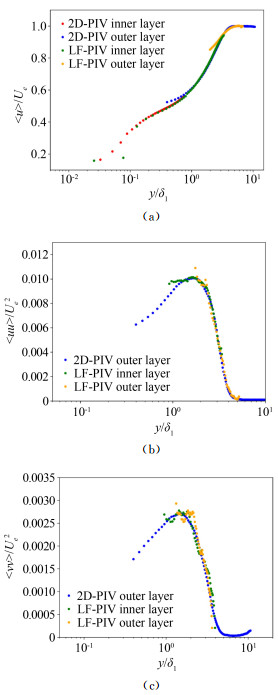
根据LF-PIV实验结果,测量区域的主流速度约为466mm/s,由Atkinson在相同水洞的实验结论[10]可以确定本实验测量区域属于自相似区。图 5为主流方向速度分量的分布曲线及雷诺应力分布曲线。基于自相似的性质,为了能够将LF-PIV实验得到的分布曲线与2D-PIV的结果进行对比,所有物理量均进行了无量纲化处理(基于主流速度Ue及动量厚度δ1)。
![]() 图 5 (a) 主流方向速度分布曲线与2D-PIV结果对比图;(b)雷诺应力〈uu〉分布曲线与2D-PIV结果对比图;(c)雷诺应力〈vv〉分布曲线与2D-PIV结果对比图Fig. 5 (a) mean streamwise velocity profiles comparing with 2D-PIV; (b) Reynolds stress 〈uu〉 profiles comparing with 2D-PIV; (c) Reynolds stress 〈vv〉 profiles comparing with 2D-PIV
图 5 (a) 主流方向速度分布曲线与2D-PIV结果对比图;(b)雷诺应力〈uu〉分布曲线与2D-PIV结果对比图;(c)雷诺应力〈vv〉分布曲线与2D-PIV结果对比图Fig. 5 (a) mean streamwise velocity profiles comparing with 2D-PIV; (b) Reynolds stress 〈uu〉 profiles comparing with 2D-PIV; (c) Reynolds stress 〈vv〉 profiles comparing with 2D-PIV由图 5(a)主流方向速度分量的分布曲线对比可知:当y/δ1>0.1,并不非常靠近下壁面时,LF-PIV测量结果与2D-PIV测量结果吻合较好,尤其是近壁面测量组,总体误差小于0.5%。不过,对远壁面测量组而言,可以观察到其测量结果有“翘尾”现象出现。
这是由于远、近壁面测量组的相机放大系数实际上并不相同而引起的配合误差。在拍摄完近壁面测量组后,竖直向上移动相机到达远壁面测量位置时,没有做到严格竖直移动,相机发生前后偏移,导致放大系数发生了改变,从而产生了误差。当y/δ1≤0.1,在动量厚度以内,LF-PIV测量结果较差。其主要原因为两点:一是由于边界层内速度大小相对较低,示踪粒子不易进入边界层内部,造成粒子浓度低,重构结果较差;二是未经过校准的DRT-MART重构算法会产生较大的粒子重构误差,在边界层内粒子浓度较低时会将此重构误差进一步放大。该算法并没有考虑到镜头畸变误差及光场相机中微透镜阵列与CCD之间的装配误差。因此,施圣贤、丁俊飞等人提出了一种基于体校准算法的DRT-MART重构算法[15],进一步提高重构质量,从而提升流场分辨率。同时,根据施圣贤、丁俊飞等人的分析,进一步提高实验中的粒子浓度(0.5ppm),可以达到更高的流场测量精度。
由图 5(b)、(c)雷诺应力分布曲线对比可知:在动量厚度以外区域,从LF-PIV测量结果中能够观察到〈uu〉/Ue2及〈vv〉/Ue2曲线内部峰值的一些特征,并且与2D-PIV实验结果吻合较好。其中,〈uu〉曲线总体误差小于2%,〈vv〉曲线误差小于7%。在动量厚度以内到下壁面之间,LF-PIV并不能得到有效测量数据。造成误差的原因与前面的分析相同。此外,图 5(b)中,远壁面测量组(黄色)中的主流部分并非完全如2D-PIV测量结果一样为直线。此处由于前面提到的原因,DRT-MART算法并不能在图像边缘得到高精度的重构结果,因而导致速度场产生较大误差。
4 结论
本文首次将LF-PIV技术应用在湍流边界层的测量中,并通过实验来分析LF-PIV测量的分辨率,得到结论如下:
(1) 基于现有的DRT-MART重构算法,LF-PIV能够进行基本的湍流边界层测量。单个瞬态三维速度场的分辨率为0.558 ×0.637×0.526 mm 3/vector,包含有23465(19×65×19)个速度矢量。
(2) LF-PIV的测量分辨率仍有很大的提升空间。通过使用新的基于体校准算法的DRT-MART重构算法以及增大粒子浓度(至1ppm)可以进一步提高LF-PIV对湍流边界层的测量精度。
下一步拟提高粒子浓度并采用基于校准算法的DRT-MART重构算法进行更深入的实验研究及数据分析。
-
![]()
图 2 LTRAC实验水洞及LF-PIV对上下两层边界层测量实验示意图
Fig. 2 Schematic of the LTRAC water tunnel and the LF-PIV experimental setup of the inner and outer layer measurements
![]()
图 3 (a) 激光光路实物图; (b)相机设置实物图; (c)粒子图像局部放大图。其中左上角红色六边形框表示微透镜的排布方式,框内为单个微透镜所成的像
Fig. 3 (a) experimental setup of the laser path; (b) experimental setup of the LF-PIV system; (c) partially magnified particle image. The red hexagonal frame in the upper left corner indicates the arrangement of the micro lenses array, and the inside of the frame is the subimage formed by a single microlens
![]()
图 4 LF-PIV对湍流边界层测量的实验结果,图示结果为时均流场,将远、近壁面两组测量结果进行拼合后的展示
Fig. 4 Overview of averaged volumetric velocity field of APG-TBL measured by LF-PIV and assembled with inner and outer layer data. The outer flow is in the positive x-direction, and the wall lies here on the right-hand side
-
[1] Ding J F, Wang J H, Liu Y Z, et al. Dense ray tracing based reconstruction algorithm for light-field volumetric particle image velocimetry[C]. The 7th Australian Conference on Laser Diagnostics in Fluid Mechanics and Combustion. Melbourne, Australia, 2015.
[2] Fahringer T W, Lynch K P, Thurow B S. Volumetric particle image velocimetry with a single plenoptic camera[J]. Measurement Science & Technology, 2015, 26(11):115201. http://www.ingentaconnect.com/content/iop/mst/2015/00000026/00000011/art115201
[3] Shi S X, Wang J H, Ding J F, et al. Parametric study on light field volumetric particle image velocimetry[J]. Flow Measurement & Instrumentation, 2016, 49:70-88. http://www.sciencedirect.com/science/article/pii/S0955598616300371
[4] 丁俊飞, 许晟明, 施圣贤.光场单相机三维流场测试技术[J].实验流体力学, 2016, 30(6):50-58. http://www.syltlx.com/CN/abstract/abstract10980.shtml Ding J F, Xu S M, Shi S X. Light field volumetric particle image velocimetry[J]. Journal of Experiments in Fluid Mechanics, 2016, 30(6):50-58. http://www.syltlx.com/CN/abstract/abstract10980.shtml
[5] Li H T, Ding J F, Qu W H, et al. Investigation of 3D flow behavior inside a rod bundle using Light Field-PIV and the matched refractive index techniques[C]. The International Symposium on Particle Image Velocimetry. Busan, Korea, 2017.
[6] Xu S M, Ding J F, Zhao Z, et al. 3D flow measurements of circular air jet at Re=30, 000 using light field particle image velocimetry[C]. The International Symposium on Particle Image Velocimetry. Busan, Korea, 2017.
[7] Bolton J T, Thurow B, Arora N, et al. Single camera 3D measurement of a shock wave-turbulent boundary layer interaction[C]. The 55th AIAA Aerospace Sciences Meeting. Grapevine, Texas, 2017.
[8] Shi S X, Ding J F, New T H, et al. Light-field camera-based 3D volumetric particle image velocimetry with dense ray tracing reconstruction technique[J]. Experiments in Fluids, 2017, 58(7):78. DOI: 10.1007/s00348-017-2365-3
[9] Shi S X, Ding J F, Atkinson C, et al. A detailed comparison of single-camera light-field PIV and tomographic PIV[J]. Experiments in Fluids, 2018, 59(3):46. DOI: 10.1007/s00348-018-2500-9
[10] Atkinson C, Buchner A J, Soria J, et al. Experimental mea-surements of a self-similar adverse pressure gradient turbulent boundary layer[C]. 20th Australasian Fluid Mechanics Conference. Perth, Australia, 2016.
[11] Atkinson C, Buchner A J, Soria J, et al. Time-resolved PIV measurements of a self-similar adverse pressure gradient turbulent boundary layer[C]. The 18th International Symposium on the Application of Laser and Imaging Techniques to Fluid Mechanics. Lisbon, Portugal, 2016.
[12] Shi S X, Ding J F, New T H. Dense ray tracing based reconstruction algorithm for light field PIV and comparative study with Tomo-PIV[C]. The 18th International Symposium on the Application of Laser and Imaging Techniques to Fluid Mechanics. Lisbon, Portugal, 2016.
[13] Atkinson C, Soria J. An efficient simultaneous reconstruction technique for tomographic particle image velocimetry[J]. Experiments in Fluids, 2009, 47(4-5):553-568. DOI: 10.1007/s00348-009-0728-0
[14] Soria J. An investigation of the near wake of a circular cylinder using a video-based digital cross-correlation particle image velocimetry technique[J]. Experimental Thermal & Fluid Science, 1996, 12(2):221-33. http://www.sciencedirect.com/science/article/pii/0894177795000860
[15] Shi S X, Ding J F, New T H, et al. Volumetric calibration for single-camera light-field PIV[J]. Experiments in Fluids, 2019, 60(1):21. DOI: 10.1007/s00348-018-2670-5
-
期刊类型引用(2)
1. 傅梦希,朱效宇,张良,许传龙. 基于深度残差神经网络的光场粒子图像测速粒子场重建方法. 光学学报. 2024(16): 152-162 .  百度学术
百度学术
2. 李晓辉,王宏伟,黄湛,赵俊波. 层析粒子图像测速技术研究进展. 实验流体力学. 2021(01): 86-96 . 本站查看
其他类型引用(4)
 下载:
下载:


计量
- 文章访问数: 277
- HTML全文浏览量: 140
- PDF下载量: 33
- 被引次数: 6






