
Wind tunnel test investigation on buffeting characteristics of horizontal tail of commercial aircraft in low-speed cruise configuration
-
摘要: 提出一种分析平尾抖振的风洞试验方法,通过在某型常规布局民用客机刚性全模的主翼和平尾表面安装超小型脉动压力传感器,测量并分析了主翼及平尾表面脉动压力的时域与频域数据,得到了在主翼尾流及自身流动特性影响下平尾不同截面的脉动压力特性和表面压力分布特性。结果表明:在中小迎角下,主翼出现强分离流动时产生的随机脉动压力激励会引起平尾结构强迫振动,且平尾表面的脉动压力主频与主翼尾流的脉动压力主频相近。在大迎角下,平尾不再受主翼尾流的干扰,其脉动压力特性与自身的分离特性相关,且沿平尾展向向外脉动压力功率谱密度值逐渐降低。Abstract: In this paper, a wind tunnel test method is proposed to analyze the buffeting of the horizontal tail. By installing subminiature pulsating pressure sensors on the wing and horizontal tail surface of a commercial aircraft with conventional layout, the time domain and frequency domain data of the pulsating pressure on the wing and horizontal tail surface are measured and analyzed. The test results show the characteristics of fluctuating pressure and surface pressure distribution under the influence of the wing wake and its own flow characteristics on different sections of the horizontal tail. The results show that the structural forced vibration of the horizontal tail is induced by the random fluctuating pressure excitation generated by the strong separated flow of the wing at medium and small angles of attack, and the dominant frequency of the fluctuating pressure on the horizontal tail surface is close to that of the vortex on the main wing. At large angles of attack, the horizontal tail is no longer disturbed by the wake of the main wing, its fluctuating pressure characteristics are related to its own separation characteristics, and the power spectral density of the fluctuating pressure decreases gradually along the spanwise direction of the horizontal tail.
-
Keywords:
- commercial aircraft /
- horizontal tail /
- wind tunnel test /
- fluctuating pressure
-
0 引言
敏感性分析是一种研究模型中参数的小量变化对其他指标影响程度的分析方法。通过敏感性分析可以定量得到参数的敏感性导数,从而用于评估各参数的重要程度以及计算不确定度。该方法在武器装备性能评估[1-2]、工程结构设计[3-4]、石油开采[5]和气动外形优化[6-7]等方面应用较为广泛。
罗鹏程等[8]指出武器装备敏感性分析可用于评估武器装备的重要程度,是确定武器装备发展建设重点的依据。金镭等[9]通过敏感性分析获得了战斗机性能指标与国外先进飞机之间的差距,为战斗机的改型优化指明了方向。唐冕等[10]针对大跨度自锚式悬索桥结构,建立了基于桥梁多振型耦合的气动参数敏感性分析理论和方法。西北工业大学的徐林程等[11-12]采用自动微分方法获得了翼型压力系数对迎角、马赫数、雷诺数和几何外形的敏感性导数,其中,马赫数的敏感性导数明显高于其他参数。Albring等[13]利用开源代码SU2计算了M6机翼的阻力系数敏感度分布,计算结果显示激波附近区域对阻力的贡献最大。Yang等[14]基于翼型的敏感度信息和梯度算法对NACA0012翼型进行了优化,使阻力降低83%。Liu等[15]采用随机配置法对高超声速飞行器进气道流场计算结果进行了分析,得到了迎角、马赫数、雷诺数、来流温度和壁面温度等参数对压力场的不确定度和敏感度的影响,为进气道性能评估提供了可靠的数据支撑。
尽管数值计算在稳态流动的敏感性分析方面取得了巨大的进步,但是对于非定常流动,数值计算仍面临计算量难以承受、收敛性差等问题。因此,发展基于风洞试验的非定常流动敏感性分析方法显得尤为重要。
空腔流动是一种典型的大分离非定常流动,开展空腔流动的敏感性分析试验对内埋武器舱气动噪声载荷的不确定度评估具有重要的应用价值。近年来,人们在空腔流动参数影响研究方面开展了大量的工作。Plentovich等[16]通过在平板上粘贴金刚砂来改变空腔入口湍流边界层厚度,分析了边界层厚度变化对空腔流动特性的影响。Thangamani等[17]通过改变模型尺寸研究了雷诺数对空腔噪声的影响。Merrick[18]开展了马赫数为1.43、1.84和2.22的超声速空腔流动风洞试验,分析了马赫数对峰值噪声频率的影响。这些研究工作主要通过离散地改变试验参数(试验参数的相对变化量大于10%)来研究空腔流动参数影响,尚未发展出可连续改变试验参数(试验参数的相对变化量在1%左右)的敏感性试验方法。
本文综合采用调节调压阀的开度和变模型迎角的方法实现了亚、跨、超声速下马赫数的连续变化。开展了0.6、0.9和2.0等3个典型马赫数下的空腔噪声敏感性分析,计算了脉动压力系数、主导声模态St和谱峰对马赫数的敏感性导数。敏感度研究结果不仅可用于内埋武器舱气动噪声载荷的不确定度评估,也有助于更好地认识空腔噪声特性。
1 试验方法
1.1 风洞设备
试验在中国空气动力研究与发展中心FL-32直流暂冲式跨超声速风洞中完成。该风洞马赫数范围为0.3~4.0,雷诺数范围为(3.3~89.0)×106 m-1,试验段截面为0.6 m×0.6 m的矩形。超声速下,试验段四周均为实壁;亚跨声速下,将试验段上下壁板更换为槽壁。
1.2 空腔试验模型
试验模型采用中国空气动力研究与发展中心设计的C201标准空腔模型[19-20],如图 1所示。该模型由平板、腔体和盖板三部分组成。空腔模型前缘为可更换的安装块,在亚跨声速条件下采用椭圆形前缘以消除前缘流动分离,在超声速条件下采用尖劈外形以避免形成头部激波,从而有效避免了前缘分离和脱体激波等对下游空腔流动的干扰。试验过程中,模型通过支杆与试验段迎角机构连接,可实现迎角的连续变化。
C201空腔模型总长514 mm,宽320 mm。腔体长度、深度和宽度分别为200.0、33.3和66.7 mm。空腔几何长深比为6,属于典型的开式空腔流动。为了获取腔内噪声特性,在空腔底部中轴线上等距离布置了10个脉动压力传感器,如图 2所示。传感器型号为Kulite公司生产的XCE-062压阻式传感器,其量程为30 psi,传感器采样频率为50 kHz。试验过程中,采样持续时间设为10 s。
亚跨超声速下,利用总压耙(见图 3)测量空腔入口马赫数。总压耙是一种用于测量湍流边界层内速度分布的试验装置,安装在空腔上游5 mm处。总压耙的高度为19.8 mm,共17个总压测孔,测压管外径为0.6 mm,内径为0.3 mm, 为了降低激波干扰,孔与孔之间间隔一个孔的距离。静压测点布置在平板上,用于测量边界层静压。静压测点的流向位置与总压耙相同,展向距离总压耙约5 mm,以减小总压耙对边界层内静压分布的干扰。
1.3 马赫数敏感性试验方法
亚跨声速下,FL-32风洞采用收缩喷管,可通过调节上游调压阀的开度,连续改变试验段入口总压和马赫数。超声速下,FL-32风洞采用收缩-扩张喷管,试验段入口马赫数完全由喷管型面确定。喷管型面的调试需要花费大量的人力物力,且维护使用成本高,因此超声速风洞可供使用的喷管数量十分有限,通过更换喷管难以做到马赫数的连续变化。本文从C201空腔模型的特点出发,提出了一种通过改变模型迎角实现空腔入口马赫数连续变化的方法。试验中通过调节模型迎角,在平板前缘形成不同扩张(或压缩)角的膨胀(或弱压缩)波,气流经过平板前缘的膨胀(或弱压缩)波后,马赫数将升高(或降低)。
由于马赫数测量装置会对空腔流动产生干扰,因此马赫数测量试验和脉动压力测量试验分开进行。亚跨声速下,采用连续变马赫数的吹风方式开展试验,马赫数名义增量为0.010。超声速下,通过连续变迎角的方式改变马赫数,迎角增量为1°。
2 数据处理方法
2.1 马赫数计算方法
根据亚声速的等熵关系式和超声速的激波关系式,求解式(1)的非线性方程,可计算得到总压耙第i测点处的马赫数Mai。

(1) 式中,pi为总压耙第i测点处的总压,ps为边界层静压。
前期边界层测量试验结果[20]表明,不同马赫数下入口边界层厚度一般在5 mm以内,第6测点以上的测压管处于自由来流均匀区域。本次试验选择远离物面10个测点的平均值作为空腔入口马赫数Ma。

(2) 2.2 噪声数据处理方法
首先,滤除压力时序数据p(n)中的平均成分p,得到脉动压力序列p′(n):

(3) 其中,p为p(n)的算术平均值,N为样本总量。压力的脉动程度一般用压力脉动量的均方根来表示:

(4) 其无量纲形式为:

(5) 其中,ρ∞为空腔入口处来流密度,U∞为空腔入口处来流速度。
然后,通过Burg方法计算脉动压力信号的功率谱密度函数PSD(f)。其中f为频率,其无量纲形式为:

(6) 其中,St为斯特劳哈尔数,L为空腔长度。脉动压力功率谱密度无量纲形式psd(St)为:

(7) 2.3 敏感性导数计算方法
采用最小二乘法计算敏感性导数,变量y对变量x的敏感性导数为:

(8) 其中,(xi, yi)为第i个样本点。
3 试验结果分析
3.1 马赫数测量结果
在亚声速(Ma=0.6)、跨声速(Ma=0.9)和超声速(Ma=2.0)下开展了空腔噪声的马赫数敏感性研究试验。亚跨声速下采用连续变马赫数吹风,超声速下采用连续变迎角吹风,通过总压耙实际测量得到的马赫数序列如表 1所示。亚跨声速下,马赫数增量约为0.010;超声速下,马赫数增量约为0.037。
表 1 马赫数测量结果Table 1 Mach numbers measured by boundary layer probesMa1 Ma2 Ma3 Ma4 亚声速 0.5785 0.5899 0.5992 0.6087 跨声速 0.8802 0.8905 0.9000 0.9106 超声速 1.9740 2.0102 2.0471 2.0843 3.2 脉动压力系数的敏感性分析
图 4展示了亚跨超声速下空腔脉动压力系数随马赫数的变化曲线。2条曲线分别对应图 2中的P9和P10测点。这2个测点位于压力脉动剧烈的空腔后部,具有一定的代表性。从图 4可以看出,在亚声速和跨声速下,P9和P10测点脉动压力系数随着马赫数的增加而增加,而超声速下,脉动压力系数随马赫数的增加而减小。Hankey等[21]开展了空腔流动的线性稳定性分析,获得了不同马赫数下的扰动增长率曲线。分析结果表明,马赫数从0增长至1左右时,扰动增长率逐渐升高,而马赫数从1增长至2.5时,扰动增长率逐渐降低。本文试验得到的腔内脉动压力变化趋势与Hankey等得到的扰动增长率曲线一致。线性不稳定性对空腔前缘剪切层内扰动的发展起着重要作用,从而对空腔压力脉动产生重要影响,因此扰动增长率和腔内脉动压力的变化趋势往往保持一致。在低马赫数下,剪切层中低速运动的大尺度旋涡与空腔后壁碰撞产生的声波强度较弱,从而导致以声波为主要载体的反馈回路难以建立,腔内噪声水平低,脉动压力系数小。随着马赫数的增加,在空腔后缘产生的声波强度逐渐增强,声反馈回路越来越稳固,流声耦合使得空腔噪声明显升高,脉动压力系数也随之升高。然而,随着马赫数的进一步增加,可压缩性随之增大,大尺度拟序涡结构逐步消失,三维小尺度涡结构逐渐增多[22],剪切层与空腔后壁撞击产生的声波强度逐渐下降,空腔噪声和脉动压力系数也随之降低。
![]() 图 4 脉动压力系数随马赫数的变化曲线Fig. 4 Curves of fluctuating pressure coefficients vs Mach numbers
图 4 脉动压力系数随马赫数的变化曲线Fig. 4 Curves of fluctuating pressure coefficients vs Mach numbers图 5展示了亚跨超声速下空腔内不同测点脉动压力系数对马赫数的敏感性导数。通过对比可以看到,空腔后部的敏感性导数更大,主要原因在于剪切层与空腔的碰撞发生在空腔尾缘,空腔后部区域的噪声声压级最大,对流场参数的变化也最敏感。在亚跨声速下,脉动压力系数对马赫数的敏感导数有正也有负,不同测点对马赫数变化的响应并不完全相同。而超声速下,脉动压力系数对马赫数的敏感导数全部为负数,各位置测点脉动压力系数随马赫数的增加而一致减小。此外,跨声速下,脉动压力系数对马赫数的敏感性导数最大,这也表明空腔流动在跨声速区域对马赫数的变化最为敏感。
![]() 图 5 亚跨超声速下空腔脉动压力系数对马赫数的敏感性导数Fig. 5 Sensitivity of fluctuating pressure coefficients to Mach numbers in subsonic, transonic and supersonic cavity flows
图 5 亚跨超声速下空腔脉动压力系数对马赫数的敏感性导数Fig. 5 Sensitivity of fluctuating pressure coefficients to Mach numbers in subsonic, transonic and supersonic cavity flows3.3 主导声模态St的敏感性分析
随着马赫数的变化,空腔内声模态的分布也会随之调整。空腔流动一般含有多种模态,而其中的主导模态蕴含的能量最大,也是人们最为关心的模态。下面,对主导声模态St开展马赫数敏感性分析。
图 6展示了亚跨超声速下空腔后部测点(P10)脉动压力功率谱随马赫数的变化趋势。亚声速和超声速下,空腔主导声模态分别为2阶和5阶Rossiter模态。而跨声速下,空腔主导声模态随着马赫数的变化从1阶切换到2阶。从图 7和表 2可以看出,在不考虑模态切换的情况,不同速域下,随着马赫数的增加,主导声模态St均随之减小,主导模态St对马赫数的敏感性导数均为负数。Rossiter[23]提出的空腔声模态频率预估公式(

![]() 图 6 亚跨超声速下不同马赫数的脉动压力功率谱Fig. 6 Power spectrum of dynamic pressure for different Mach numbers at subsonic, transonic and supersonic speed表 2 主导模态St对马赫数的敏感性导数Table 2 Sensitivity of St numbers to Mach numbers
图 6 亚跨超声速下不同马赫数的脉动压力功率谱Fig. 6 Power spectrum of dynamic pressure for different Mach numbers at subsonic, transonic and supersonic speed表 2 主导模态St对马赫数的敏感性导数Table 2 Sensitivity of St numbers to Mach numbers∂St/∂Ma 亚声速(Ma=0.60) -0.794 跨声速(Ma=0.90) -1.011(Mode 1), -0.889(Mode 2) 超声速(Ma=2.00) -0.369 其他研究中也发现了类似的主导模态的切换现象。Chandra等[24]在其超声速空腔试验中首次发现了这种主导模态频率的“突跳”现象。Wang等[25]进一步指出, 在一定的条件下,连续改变来流速度或空腔长度,均可能引起空腔主导模态频率的跳跃式变化。
3.4 主导声模态谱峰的敏感性分析
马赫数不仅影响声模态频率,也会影响各阶模态的能量分布。下面开展主导声模态谱峰的马赫数敏感性分析,研究马赫数变化对声模态能量的影响。
图 8为亚跨超声速下空腔底部P10测点的主导声模态谱峰随马赫数的变化曲线。其中,跨声速下, 由于主导声模态发生了切换,因此针对切换前后的2种模态都绘制了曲线。可以看到, 亚声速下,随着马赫数的增加,主导声模态谱峰升高;而超声速下,随着马赫数的增加,主导声模态谱峰降低,这一规律与脉动压力系数的变化趋势一致;跨声速下,随着马赫数的增加,1阶模态谱峰降低,而2阶模态谱峰升高,能量在不同模态之间发生了迁移。
![]() 图 8 主导声模态谱峰随马赫数的变化曲线Fig. 8 Curves of peak values of normalized pressure spectral density with Mach numbers
图 8 主导声模态谱峰随马赫数的变化曲线Fig. 8 Curves of peak values of normalized pressure spectral density with Mach numbers表 3列举了亚跨超声速下,不同模态谱峰对马赫数的敏感性导数。亚跨声速下,谱峰对马赫数的敏感导数有正也有负,表明不同模态在发生竞争,随着马赫数的变化,能量在不同模态之间重新分配;而超声速下,谱峰对马赫数的敏感导数全部为负数,表明全部模态的能量随着马赫数的增加而降低,这一现象对开展超声速空腔噪声控制有一定的启发意义,可以考虑通过增大入口马赫数的方法来抑制峰值噪声。
表 3 主导声模态谱峰对马赫数的敏感性导数Table 3 Sensitivity of peak value of normalized pressure spectral density to Mach numbersMode 1 Mode 2 Mode 3 Mode 4 Mode 5 亚声速 — 0.252 -0.092 0.308 — 跨声速 -9.467 16.449 -0.844 — — 超声速 -0.014 -0.020 -0.008 -0.029 -1.129 4 结论
本文针对亚跨超声速下特定马赫数区间内的空腔噪声特性开展了马赫数敏感性研究试验。在当前研究的马赫数区间内,结论如下:
(1) 空腔后部测点脉动压力系数在亚跨声速下随着马赫数的增加而增加,而超声速下随着马赫数的增加而减小。跨声速下,脉动压力系数对马赫数的敏感性导数最大,表明空腔流动在跨声速区域对马赫数的变化最为敏感。
(2) 不考虑模态切换的情况下,不同速域的主导声模态St对马赫数的敏感性导数均为负数。
(3) 主导声模态谱峰在亚声速下随着马赫数的增加而增加,而超声速下随着马赫数的增加而降低。
(4) 超声速下,各阶模态谱峰对马赫数的敏感导数均为负数,表明马赫数的增加将导致各阶声模态能量降低。
-
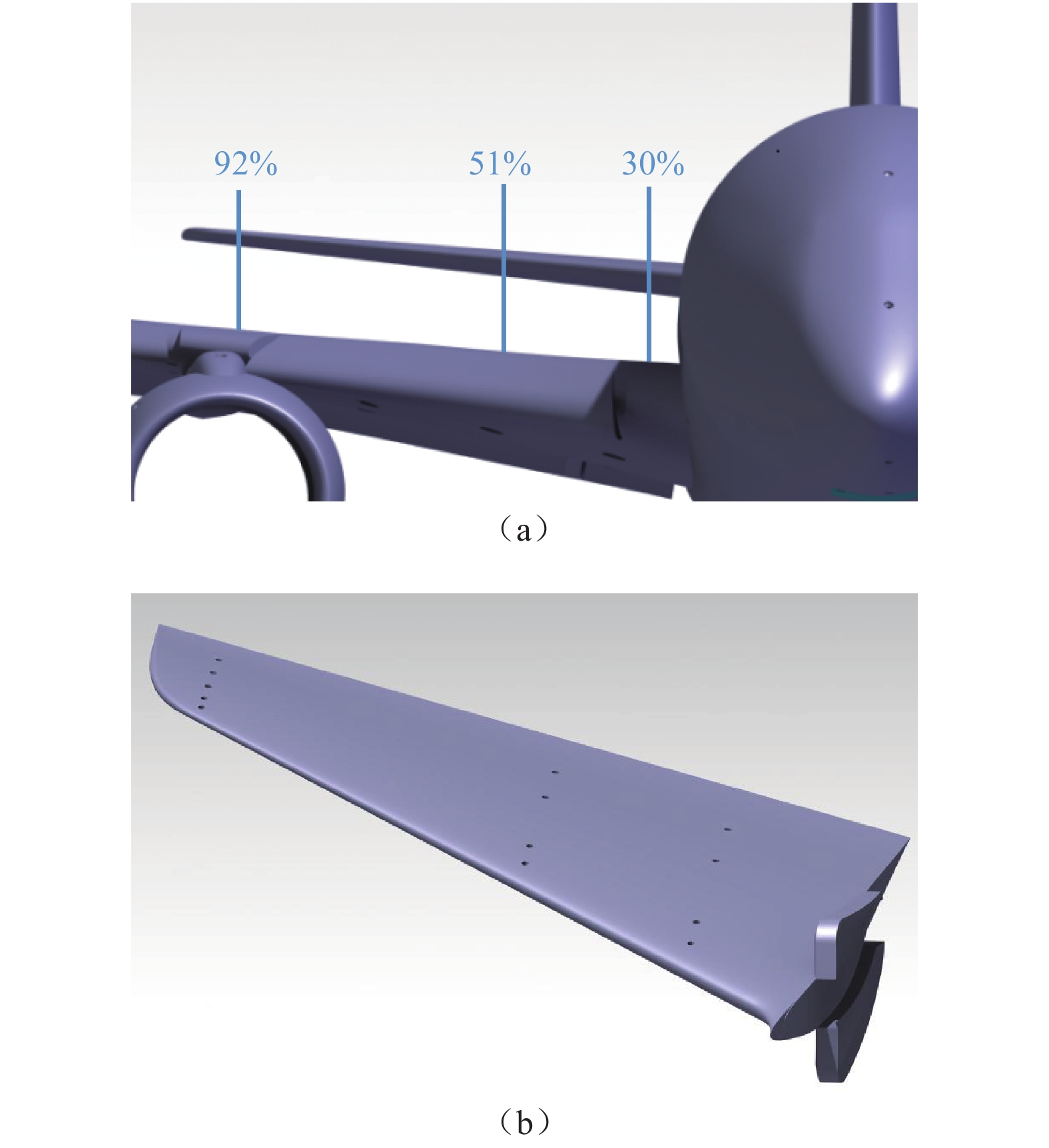
![]()
图 3 主翼尾缘脉动压力随迎角的变化
Fig. 3 Variation of fluctuation pressure at trailing edge of main wing with angle of attack
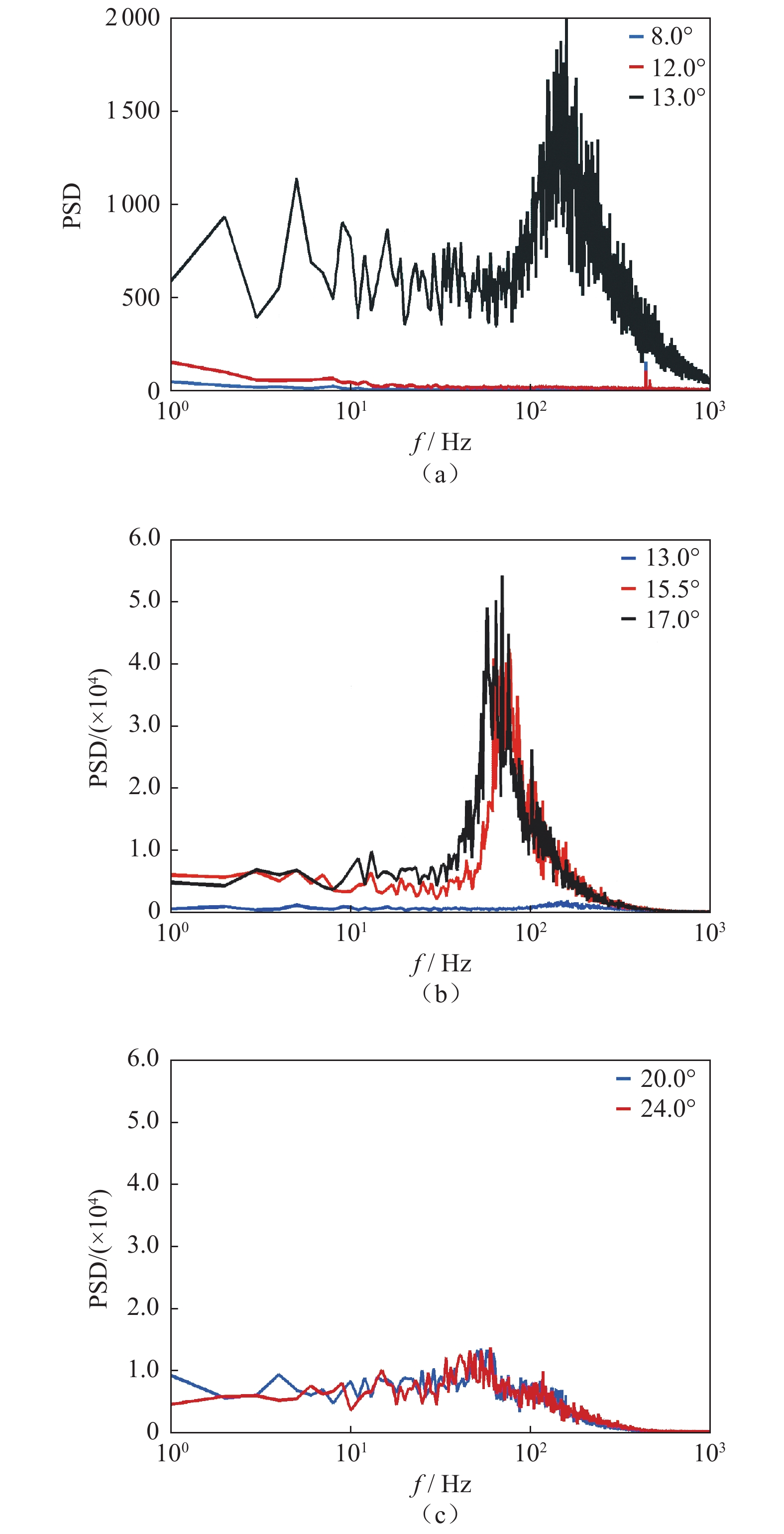
![]()
图 4 平尾30%展向截面近前缘处脉动压力及上表面压力分布随迎角的变化
Fig. 4 Variation of pressure distribution on horizontal tail surface and fluctuation pressure at leading edge of 30% span-wise section with angle of attack
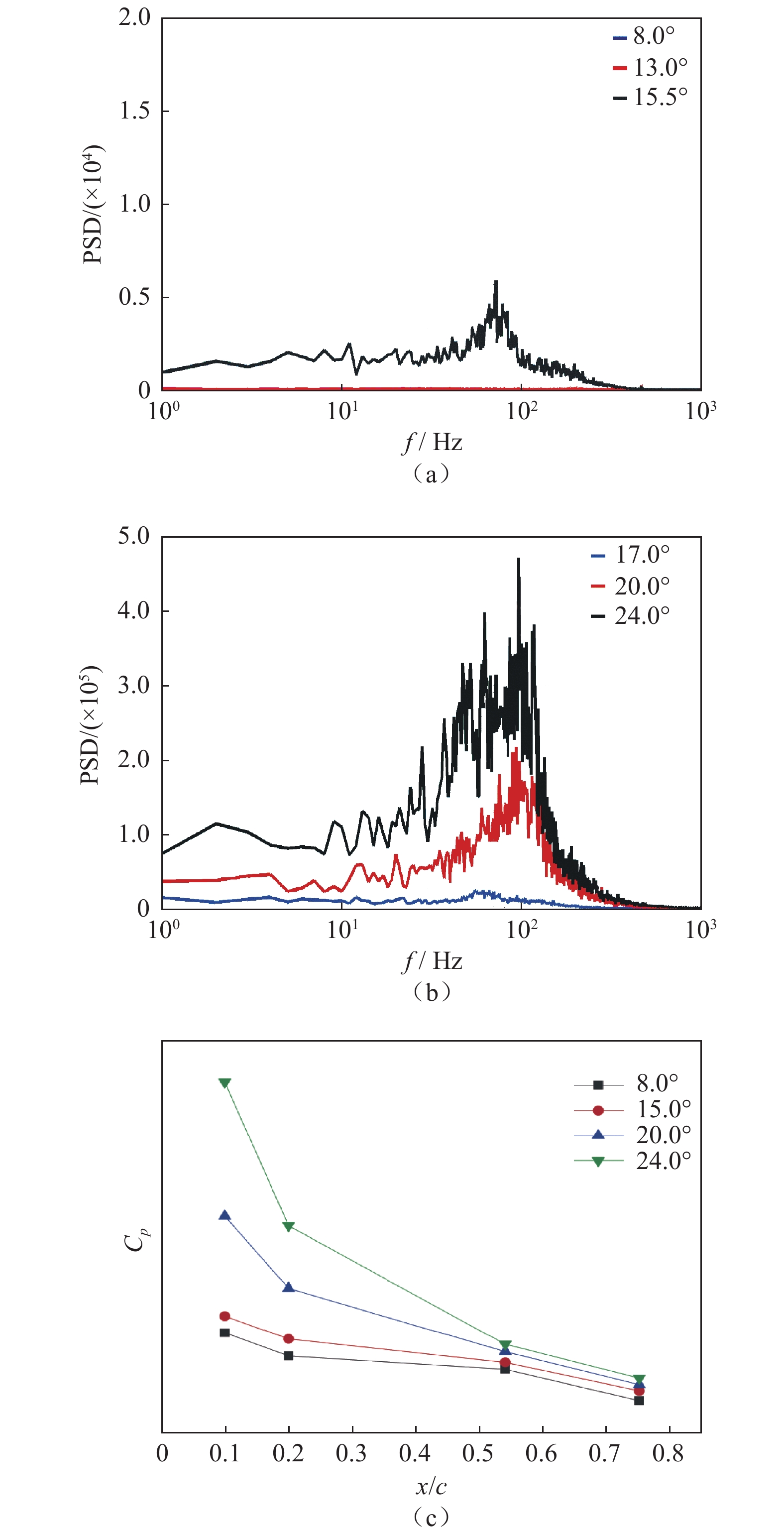
![]()
图 5 平尾51%展向截面近前缘处脉动压力随迎角的变化
Fig. 5 Variation of pressure distribution on horizontal tail surface and fluctuation pressure at leading edge of 51% span-wise section with angle of attack
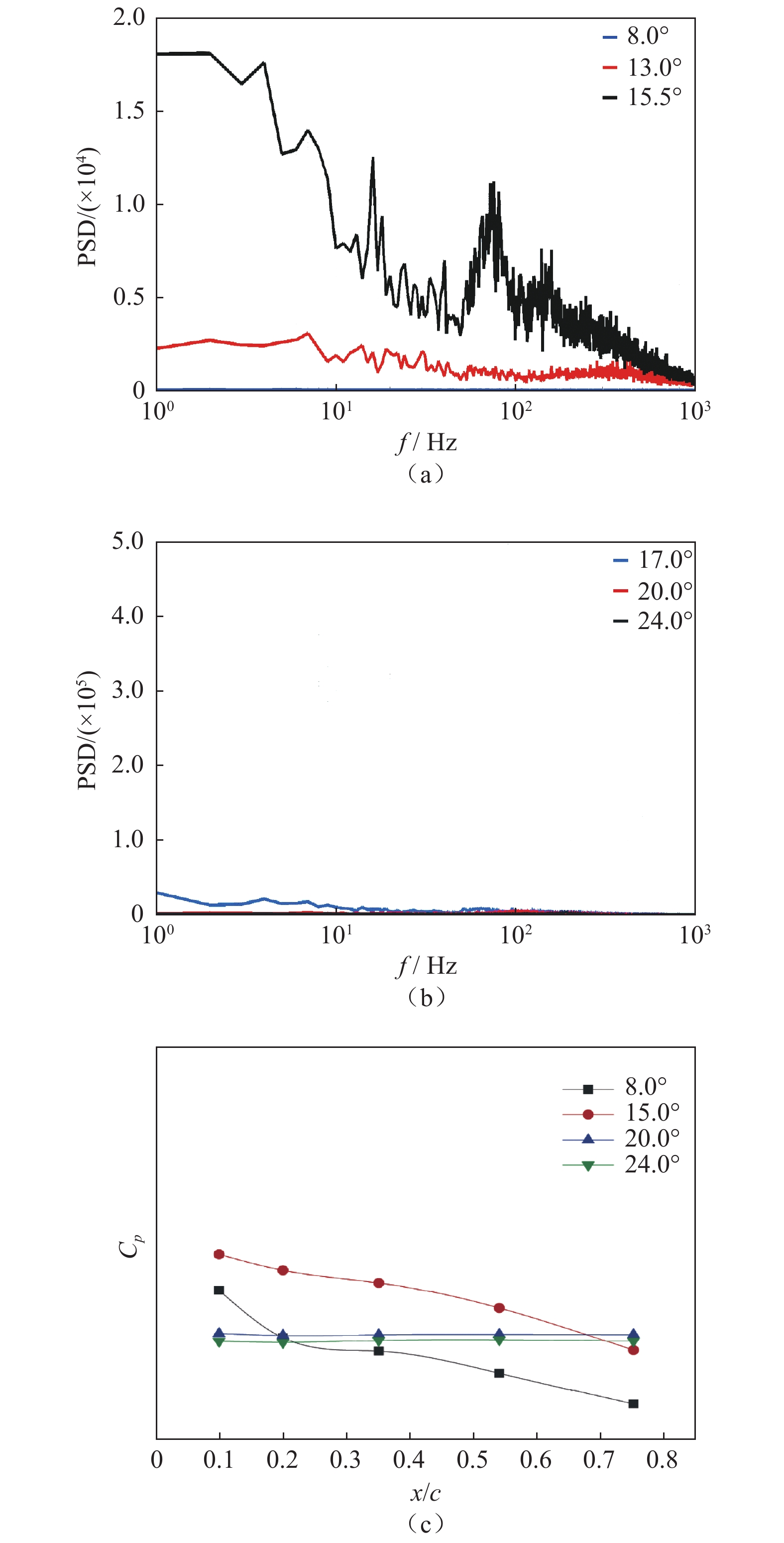
![]()
图 6 平尾92%展向截面近前缘处脉动压力随迎角的变化
Fig. 6 Variation of pressure distribution on horizontal tail surface and fluctuation pressure at leading edge of 92% span-wise section with angle of attack
表 1 右平尾上表面13个传感器的位置
Table 1 Position of 13 sensors on the upper surface of the right horizon- tal tail
y/b 0.92 0.51 0.30 x/c 0.10 0.10 0.10 0.20 0.20 0.20 0.35 0.54 0.54 0.54 0.75 0.75 0.75  下载: 导出CSV
下载: 导出CSV
表 2 右主翼上表面1个传感器的位置
Table 2 Position of 1 sensor on the upper surface of right main wings
y/b 对应平尾92%截面位置 x/c 接近主翼面后缘
下载: 导出CSV
-
[1] MABEY D G. Some aspects of aircraft dynamic loads due to flow separation[J]. Progress in Aerospace Sciences,1989,26(2):115-151. doi: 10.1016/0376-0421(89)90006-7
[2] ZAN S J,MAULL D J. Buffet excitation of wings at low speeds[J]. Journal of Aircraft,1992,29(6):1137-1143. doi: 10.2514/3.46296
[3] FLYNN G A,MORRISON J F,MABEY D G. Buffet alleviation on swept and unswept wings at high incidence[J]. Journal of Aircraft,2001,38(2):368-378. doi: 10.2514/2.2771
[4] 王巍,杨智春,张新平. 扰流激励下垂尾抖振响应主模态控制风洞试验研究[J]. 振动与冲击,2012,31(16):18-21. DOI: 10.3969/j.issn.1000-3835.2012.16.004 WANG W,YANG Z C,ZHANG X P. Fin buffeting alleviation in disturbed flow by buffeting principal modal control method[J]. Jour-nal of Vibration and Shock,2012,31(16):18-21. doi: 10.3969/j.issn.1000-3835.2012.16.004
[5] 张庆,叶正寅. 一种基于充气气囊的垂尾抖振抑制新方法研究[J]. 工程力学,2014,31(12):234-240. DOI: 10.6052/j.issn.1000-4750.2013.06.0564 ZHANG Q,YE Z Y. Study on a new method for suppression of vertical tail buffeting using inflatable bumps[J]. Engineering Mecha-nics,2014,31(12):234-240. doi: 10.6052/j.issn.1000-4750.2013.06.0564
[6] 韩冰,徐敏,蔡天星,等. 涡破裂诱导的垂尾抖振数值模拟[J]. 航空学报,2012,33(5):788-795. HAN B,XU M,CAI T X,et al. Numerical simulation of vertical tail buffeting induced by vortex breakdown[J]. Acta Aeronautica et As-tronautica Sinica,2012,33(5):788-795.
[7] ZHANG Q,YE Z Y. Novel method based on inflatable bump for vertical tail buffeting suppression[J]. Journal of Aircraft,2015,52 (1): 367-371. doi: 10.2514/1.c032552
[8] FERMAN M A,HUTTSELL L J,TURNER E W. Experiments with tangential blowing to reduce buffet response on an F-15 model[J]. Journal of Aircraft,2004,41(4):903-910. doi: 10.2514/1.290
[9] SHETA E, ROCK S, HUTTSELL L. Characteristics of vertical tail buffet of F/A-18 aircraft[C]//Proc of the 39th Aerospace Sciences Meeting and Exhibit. 2001. doi: 10.2514/6.2001-710
[10] ZHAO Y H,HU H Y. Active control of vertical tail buffeting by piezoelectric actuators[J]. Journal of Aircraft,2009,46(4):1167-1175. doi: 10.2514/1.39464
[11] HAUCH R M,JACOBS J H,DIMA C,et al. Reduction of vertical tail buffet response using active control[J]. Journal of Aircraft,1996,33(3):617-622. doi: 10.2514/3.46990
[12] ZHANG Q,HUA R H,YE Z Y. Experimental and computational investigation of novel vertical tail buffet suppression method for high sweep delta wing[J]. Science China Technological Sciences,2015,58(1):147-157. doi: 10.1007/s11431-014-5702-2
[13] RICCI S, BERETTA J, FONTE F, et al. Buffet load alleviation on the fin of a high performance training aircraft[C]//Proc of the 58th AIAA/ ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference. 2017. doi: 10.2514/6.2017-1819.
[14] PETTIT C L,BROWN D L,BANFORD M P,et al. Full-scale wind-tunnel pressure measurements of an F/A-18 tail during buffet[J]. Journal of Aircraft,1996,33(6):1148-1156. doi: 10.2514/3.47069
[15] ELMEKAWY A,KANDIL O A,BAYSAL O. F/A-18 twin-tail buffet modeling using nonlinear eddy viscosity models[J]. Journal of Air-craft,2015,53(4):1106-1112. doi: 10.2514/1.C033482
[16] CANDON M J, LEVINSKI O, ALTAF A, et al. Aircraft transonic buffet load prediction using artificial neural networks[C]//Proc of the AIAA Scitech 2019 Forum. 2019. doi: 10.2514/6.2019-0763
[17] 高杰,张明禄,吕志咏. 双立尾和三角翼之间的气动干扰实验研究[J]. 实验流体力学,2005,19(3):51-57. DOI: 10.3969/j.issn.1672-9897.2005.03.011 GAO J,ZHANG M L,LU Z Y. Investigation of aerodynamic interference between delta wings and twin fins[J]. Journal of Experi-ments in Fluid Mechanics,2005,19(3):51-57. doi: 10.3969/j.issn.1672-9897.2005.03.011
[18] ZIMMERMAN N, FERMAN M, YURKOVICH R, et al. Prediction of tail buffet loads for design application[C]//Proc of the 30th Struc-tures, Structural Dynamics and Materials Conference. 1989. doi: 10.2514/6.1989-1378
[19] MEYN L A,JAMES K D. Full-scale wind-tunnel studies of F/A-18 tail buffet[J]. Journal of Aircraft,1996,33(3):589-595. doi: 10.2514/3.46986
[20] ANDERSON W D,PATEL S R,BLACK C L. Low speed wind tunnel buffet testing on the F/A-22[J]. Journal of Aircraft,2006,43(4):879-885. doi: 10.2514/1.10247
[21] DANOWSKY B P, SCHULZE P C. Control surface buffet load measurement using aircraft actuators[C]//Proc of the AIAA Atmos-pheric Flight Mechanics Conference. 2016. doi: 10.2514/6.2016-2005
[22] 管德. 气动弹性试验[M]. 北京: 北京航空学院出版社, 1986. [23] ILLI S, FINGSKES C, LUTZ T, et al. Transonic tail buffet simulations for the common research model[C]//Proc of the 31st AIAA Applied Aerodynamics Conference. 2013. doi: 10.2514/6.2013-2510










计量
- 文章访问数: 412
- HTML全文浏览量: 169
- PDF下载量: 49






