
Research on the layout scheme for the axial compressor in the 0.6 m continuous transonic wind tunnel
-
摘要: 压缩机作为连续式跨声速风洞的驱动系统,其运转性能与风洞总体性能的匹配设计是风洞研制的关键技术之一。随着大型连续式跨超声速风洞的发展,压缩机研制呈现出运转功率大和运转效率高、调节范围宽和调节精度高等鲜明特点。基于0.6 m连续式跨声速风洞的研制,对大型跨声速风洞轴流压缩机的布局方案进行研究。从气动性能、结构设计、控制等方面对压缩机位置布局和方案布局进行了分析,并阐述了风洞压缩机一体化设计的重要性。在压缩机布置于第一、二拐角段之间的前提下,通过压缩机性能试验,验证了电机外置两端驱动方案、多台电机同步控制方案和压缩机内流道整流技术等的可行性。风洞调试结果表明,压缩机运行性能良好,各项指标均满足设计技术要求,为大型连续式跨声速风洞建设奠定了基础。Abstract: As the driving system of continuous transonic wind tunnel, compressor's matching design, which considered its operating performance and the general performance of wind tunnel, is one of the key technologies in wind tunnel design. With the development of large continuous transonic and supersonic wind tunnel, the compressor trends to have larger power, higher energy efficiency, wider range, higher precision and so on. The layout scheme of the axial compressor in the 0.6 m continuous transonic wind tunnel, which is a pilot wind tunnel for large transonic wind tunnel, is studied. The location and the scheme of the main compressor are analyzed from the aspects of aerodynamic performance, structural design and control. Also, the integrated design of the wind tunnel and compressor is important for the sake of efficiency. By performance test of compressor in the 0.6 m continuous transonic wind tunnel, while the compressor arranged between the first and the second corner, the feasibility of the layout scheme of external motors and two-end drive, the synchronous control of multi motors and the rectification technology of the compressor's internal flow path is validated. All the compressor's operating performance indicators can fulfill the design-technology requirements well. The studies provide technical support for the construction of large scale continuous transonic wind tunnel.
-
-
![]()
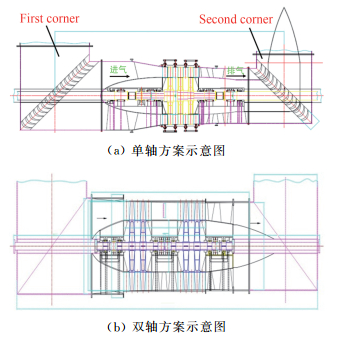
图 3 单轴与双轴驱动压缩机方案示意图
Fig. 3 Compressor sketches of one-shaft project and dual-shaft project
![]()
图 4 0.6 m风洞第一拐角段轴套整流装置示意图
Fig. 4 Sketch of rectifying device of shaft hood for the first corner in the 0.6 m wind tunnel
![]()
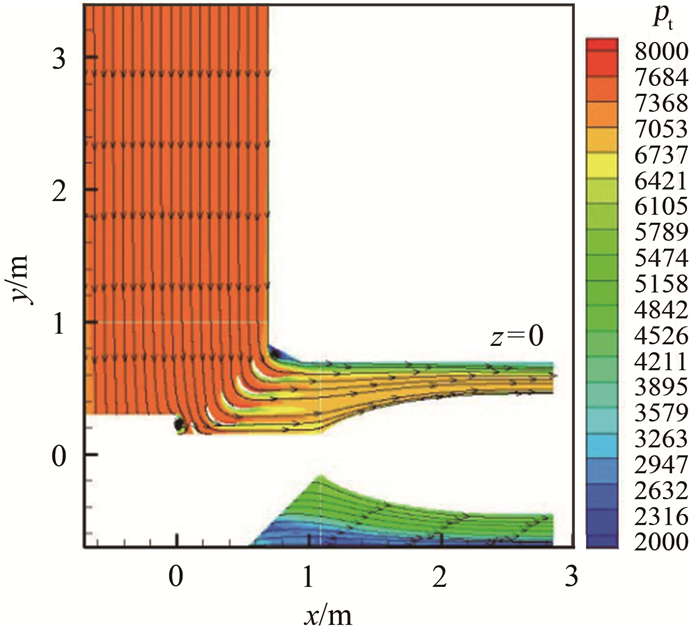
图 5 压缩机轴套整流时对称面总压分布云图
Fig. 5 Total pressure distribution of symmetry plane of the compressor
![]()
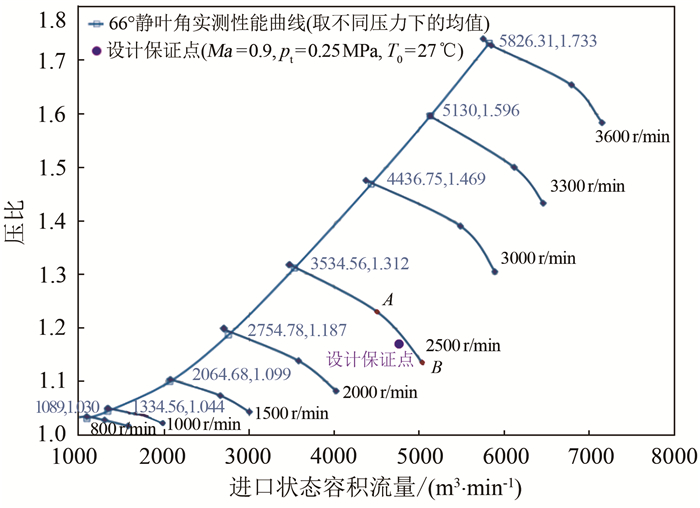
图 6 主压缩机测试性能曲线(静叶角66°)
Fig. 6 Performance curve of the main compressor(static vane angle at 66°)
表 1 0.6 m风洞主压缩机双轴方案与单轴方案比较
Table 1 Comparison between one-shaft project and dual- shaft project of the compressor in the 0.6 m wind tunnel
序号 项目 双轴方案 单轴方案 1 型号 AV90-2+2,共4级 AV90-3,共3级 2 转速范围 750~3200 r/min 1200~3600 r/min 3 风洞短轴距离 ~7 m ~5 m 4 转子个数 双转子 单转子 5 轴承 4个 2个 6 压缩机级数 4级 3级 7 驱动方式 2个电机各驱动一个转子 2个电机驱动同一个转子 8 弯曲临界转速 4000/3200=1.25>1.2,安全 4553/3600=1.264>1.2,安全 9 扭曲临界转速 513、4354、19946 r/min,安全 719、912、27979 r/min,安全 10 压缩机效率 设计点79%
(比单轴方案约低1%)设计点80%
(比双轴方案约高1%) 下载: 导出CSV
下载: 导出CSV
-
[1] GUNN J A, MARTINDALE W R, WAGNER D R. Performance evaluation of a transonic wind tunnel compressor[R]. AIAA-92-3927, 1992.
[2] MABEY D G. Some remarks on the design of transonic tunnels with low levels of flow unsteadiness[R]. NASA CR-2722, 1976.
[3] WOLF T. State of the art in circuit loss analysis of transonic wind tunnels[C]//Proc of the 20th AIAA Advanced Measurement and Ground Testing Technology Conference. 1998.
[4] 廖达雄, 陈吉明, 郑娟, 等. 0.6 m连续式跨声速风洞总体性能[J].实验流体力学, 2018, 32(6):88-93 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201806012 LIAO D X, CHEN J M, ZHENG J, et al. General performance of 0.6 m continuous transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2018, 32(6):88-93 http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201806012
[5] 廖达雄, 陈吉明, 彭强, 等.连续式跨声速风洞设计关键技术[J].实验流体力学, 2011, 25(4):74-78. http://www.syltlx.com/CN/abstract/abstract10640.shtml LIAO D X, CHEN J M, PENG Q, et al. Key design techniques of the low noise continuous transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(4):74-78. http://www.syltlx.com/CN/abstract/abstract10640.shtml
[6] 周恩民, 程松, 许靖, 等. 0.6 m连续式跨声速风洞AV90-3轴流压缩机喘振边界测试研究[J].实验流体力学, 2014, 28(5):81-85. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201405014 ZHOU E M, CHENG S, XU J, et al. Surge margin test and research of AV90-3 axial compressor in 0.6 m continuous transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2014, 28(5):81-85. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201405014
[7] 熊波, 周恩民, 程松, 等. 0.6 m连续式风洞调试运行关键技术研究.实验流体力学, 2016, 30(4):81-86. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201604014 XIONG B, ZHOU E M, CHENG S, et al. Research on key technologies of debugging and operating in 0.6 m×0.6 m continuous transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2016, 30(4):81-86. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=ltlxsyycl201604014
[8] 李红喆, 廖达雄, 丛成华.连续式跨声速风洞大开角段整流装置设计数值模拟[J].空气动力学学报, 2015, 33(2):198-203. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kqdlxxb201502009 LI H Z, LIAO D X, CONG C H. Numerical simulation of flow conditioning device design in wide angle diffuser of continuous transonic wind tunnels[J]. Acta Aerodynamica Sinica, 2015, 33(2):198-203. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=kqdlxxb201502009
[9] 周恩民, 张文, 刘恺, 等. E71-3离心压缩机热力性能试验研究[J].风机技术, 2015, 57(6):39-43, 48. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fjjs201506007 ZHOU E M, ZHANG W, LIU K, et al. Thermodynamic performance test and research of E71-3 centrifugal compressor[J]. Compressor, Blower & Fan Technology, 2015, 57(6):39-43, 48. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fjjs201506007
[10] 刘恺, 周恩民, 张文, 等.连续式高速风洞压缩机转速测量装置研制与应用[J].电气传动, 2017, 47(2):60-64. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dqcd201702013 LIU K, ZHOU E M, ZHANG W, et al. Development and application of compressor speed measurement device in continuous high speed wind tunnel[J]. Electric Drive, 2017, 47(2):60-64. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=dqcd201702013
[11] 李一滨, 乔志德.增压连续式跨声速风洞防喘振措施:旁路调节的研究[J].流体力学实验与测量, 2001, 15(4):53-58. http://www.cnki.com.cn/Article/CJFDTotal-LTLC200104010.htm LI Y B, QIAO Z D. The study of application of by-pass to prevent surging in pressurized continuous wind tunnel[J]. Experiments and Measurements in Fluid Mechanics, 2001, 15(4):53-58. http://www.cnki.com.cn/Article/CJFDTotal-LTLC200104010.htm
[12] 波普, 戈因.高速风洞试验[M].邓振瀛, 李廷林, 译.北京: 科学出版社, 1980. POPE A, GOIN K L. High-speed wind tunnel testing[M]. DENG Z Y, LI T L, translated. Beijing: Science Press, 1980.
[13] 陈天君.浅谈轴流压缩机和离心压缩机的喘振试验[J].化学工业与工程技术, 2007, 28(S1):120-122. http://www.cnki.com.cn/Article/CJFDTotal-HXGJ2007S1039.htm [14] 雷剑宇, 廖明夫, 杨伸记.预测风机喘振边界的新方法[J].风机技术, 2005, 47(4):52-53, 57. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fjjs200504019 LEI J Y, LIAO M F, YANG S J. New method of predicting surge lines of fan[J]. Compressor, Blower & Fan Technology, 2005, 47(4):52-53, 57. http://www.wanfangdata.com.cn/details/detail.do?_type=perio&id=fjjs200504019
[15] 中国人民解放军总装备部.低速风洞和高速风洞流场品质要求: GJB 1179A-2012[S].北京: 总装备部军标出版发行部, 2012. -
期刊类型引用(11)
1. 王宇辰,胡应交. 结冰试验云雾场参数与冰形测量技术研究综述. 气动研究与试验. 2025(01): 1-8 .  百度学术
百度学术
2. 曾昊,王峰,孙超. 液滴结冰研究中的光学测量方法. 力学学报. 2025(02): 316-334 . 百度学术
3. 钟富豪,刘森云,刘秀芳,代欣波,陈佳军,苗庆硕,易贤,侯予. 机翼混合相冰晶结冰现象的数值研究. 西安交通大学学报. 2024(10): 168-177 . 百度学术
4. 张丽芬,赵建辉,余邦拓,吕亚国,刘振侠. 旋转叶片通道内冰晶运动和融化数值研究. 西北工业大学学报. 2024(06): 987-995 . 百度学术
5. 马乙楗,柴得林,王强,易贤,余放. 基于蒙特卡洛方法的冰晶撞击特性计算. 南京航空航天大学学报. 2023(02): 291-301 . 百度学术
6. 马乙楗,柴得林,易贤,屈经国,王强. 考虑侵蚀效应的冰晶/混合相结冰计算方法. 航空学报. 2023(15): 276-286 . 百度学术
7. 陈佳军,刘秀芳,钟富豪,苗庆硕,郑勉,魏震,侯予. 航空发动机内冰晶的融化特性和积冰特性(英文). Transactions of Nanjing University of Aeronautics and Astronautics. 2023(06): 653-662 . 百度学术
8. 魏震,刘秀芳,钟富豪,陈佳军,苗庆硕,侯予. 微小冰晶粒子融化特性可视化实验. 航空学报. 2023(S2): 314-322 . 百度学术
9. 郭向东,胡站伟,丁亮,易贤,张平涛. 大型结冰风洞中冰晶热/力平衡特性数值研究. 航空动力学报. 2022(03): 478-491 . 百度学术
10. 孟宣市,惠伟伟,易贤,蔡晋生,李华星. AC-SDBD等离子体激励防/除冰研究现状与展望. 空气动力学学报. 2022(02): 31-49 . 百度学术
11. 黄平,卜雪琴,刘一鸣,林贵平,杨坤. 混合相/冰晶条件下的结冰研究综述. 航空学报. 2022(05): 120-138 . 百度学术
其他类型引用(2)


计量
- 文章访问数: 211
- HTML全文浏览量: 101
- PDF下载量: 18
- 被引次数: 13






