
Thrust/drag calibrations for integral inlet and jet testing on a aircraft with blended wing/body
-
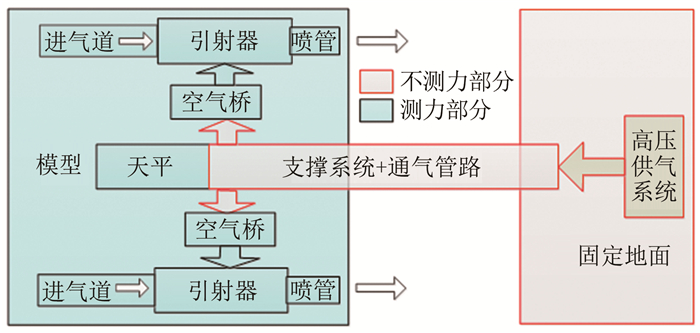
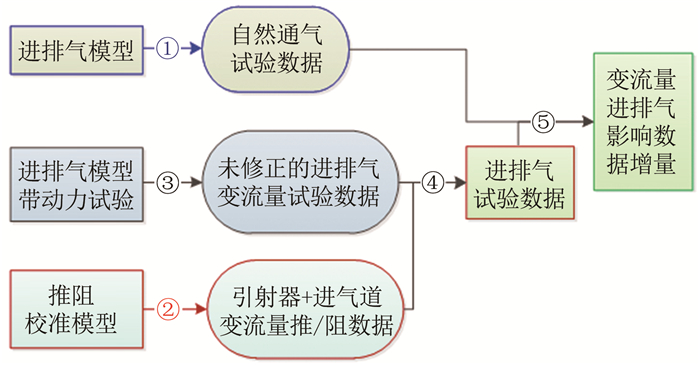
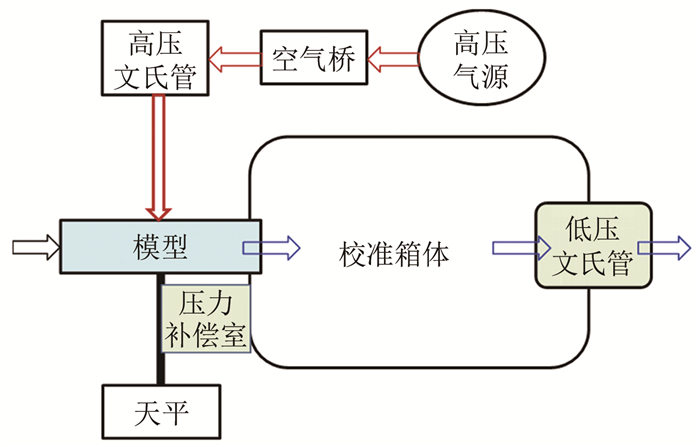
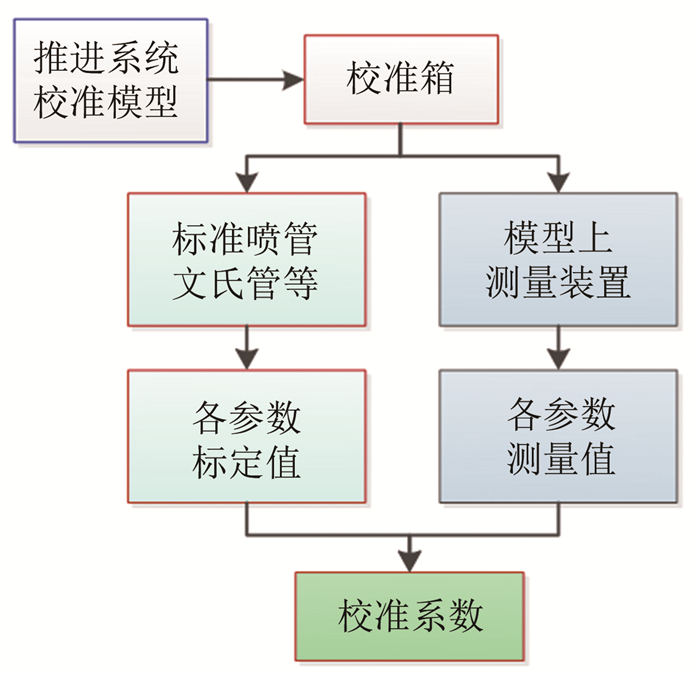
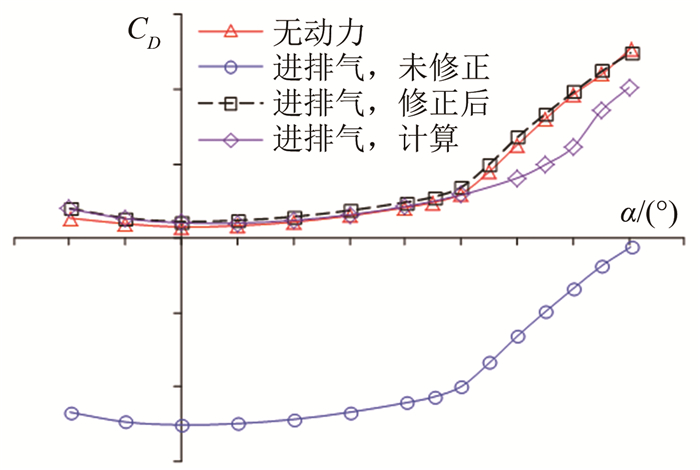
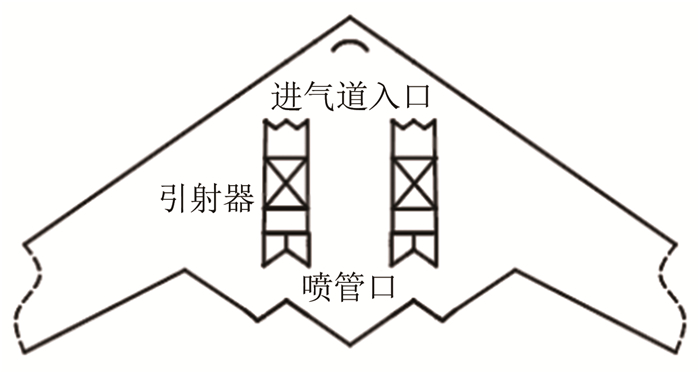
摘要: 在研究嵌入式动力装置的进/排气效应对扁平融合式飞机气动特性的影响时,发展了一种整体式进/排气模拟试验方法及推/阻校准方法。采用与飞机模型融为一体的内置式引射器同时模拟飞机的进气效应和排气效应,模型气动载荷与引射器工作时的作用力由天平同时测量获得;把模型推进系统部分分离出来,在TPS校准箱中进行推/阻校准,建立模型气动载荷与推/阻力之间的剥离方法,获得真实的进/排气效应影响试验数据。用典型的背负式进气道扁平融合式飞机模型进行了推/阻校准试验和进/排气影响风洞验证试验,验证了该方法的可行性。Abstract: When researching on the influence of the inlet and jet exhaust plume of the embedded propulsion system on the aerodynamic characteristics of a blended wing/body aircraft, a calibration method of thrust and drag for the integral inlet and jet simulation test is developed. The embedded ejector integrated with the aircraft model is employed to simulate the inlet and jet effects simultaneously. The total value of the aerodynamic load on the aircraft model and the thrust of the working ejector are measured by the balance. With the TPS calibration tank, the thrust and drag of the propulsion system can be calibrated, the decoupling of the aerodynamic load on the aircraft model with the thrust and drag of the propulsion system can be efficaciously realized, and the reliability data of inlet and jet effects can be obtained. The thrust/drag calibration method is verified by the inlet and jet simultaneously testing with black-embedded inlets of a blended wing/body aircraft.
-
Keywords:
- blended wing/body model /
- inlet and jet /
- integral simulation /
- thrust/drag calibrations /
- ejector
-
0 引 言
温度测量技术可分为接触式测温和非接触式测温[1]。接触式测温时,传感器需与被测对象充分接触,获取达到热平衡的被测对象和传感器的平均温度。常见的热电偶、示温漆和晶体测温等都属于接触式测温。
热电偶测温的工作原理是基于热电效应将温度信号转换为电信号,进而反映被测对象的温度。热电偶主体由热电极和绝缘保护套管组成,根据结构设计特征可分为埋敷式热电偶和薄膜热电偶。埋敷式热电偶通常敷设或埋设:敷设安装相对简单,但对壁面温度测量影响较大;埋设安装需在壁面开槽,影响结构强度和壁面内部的传热及温度分布。薄膜热电偶[2]采用了真空镀膜制备技术,将2种热电极薄膜沉积于绝缘层获得。薄膜电极尺寸仅几微米,热接点薄、热容量小,对壁面温度场影响较小,但在实际测量中存在元件断裂、开焊,故障率高和使用周期短等问题。
示温漆测温是基于涂料颜色与温度的对应关系来反映温度场[3],可以在不破坏被测对象表面的前提下详细测量壁面温度,适用于旋转机械和复杂表面的温度测量。但是,示温漆仅能显示最高温度,无法实时测量温度;且温度判别依赖于目测或判读技术[4],测温精度相对较低。
晶体测温的原理是:高能粒子辐射晶体会产生晶格缺陷,这些缺陷在不同温度下逐渐消除,基于晶格缺陷浓度即可判别温度[5]。晶体测温上限高、精度高且对温度场影响小,特别适合旋转部件的温度测量。但晶体测温无引线导出,无法在线读取数据,只能测量后离线判读,且晶体装配过程中易受损,引发测量误差。
非接触式测温则无需与被测对象接触即可获取被测对象温度信息。温敏漆测温是一种固体表面温度非接触测量技术,其原理是:在特定波长光源激励下,温敏漆中的荧光温敏分子基团发出不同波长的荧光,荧光特性会受到被测对象表面温度的影响,从而可以建立起两者之间的关系。与前述测温方法相比,温敏漆测温具有非接触式测量、测温范围广、精度高等优点。但温敏漆测温需解决温敏涂层的制备问题[6]。
辐射测温法是目前国内外应用最为广泛的非接触式测温法,具有不接触被测对象、不干扰目标温度场和测温上限高等优点。根据测量光谱数目的不同,可分为亮度测温法、比色测温法及多光谱测温法等。亮度测温法通过测量一个波长的辐射亮度和光谱发射率(后文简称“发射率”)来推断被测对象表面温度[7],受气体、水蒸气、角度折射等环境因素及发射率的影响大,精度较低。比色测温法通过测量2个波长的辐射亮度并采用发射率补偿算法进行测温[8],在一定程度上抑制了环境因素的影响,但仍会受到发射率先验模型的影响,测量精度有待提升。多光谱测温法通过测量多个波长(几个至几十个不等)的辐射亮度并根据发射率解算被测对象真实温度[9],能够有效降低发射率对温度测量的影响,当被测对象实际发射率与假设发射率模型一致时,测温精度较高,可广泛用于固体对象的温度测量。
使用多光谱高温计可进行多光谱测温。多光谱高温计采用的分光方式决定了测温系统的复杂度和精度。一种分光方式是利用分光棱镜或其他光学元件获取被测对象的多波长辐射信息[10]。当测量的波长数量增加时,光学元件尺寸增大,系统布置趋于复杂。另一种分光方式是将滤光片安装于法兰盘上组成滤光轮,滤光轮在摄像机前旋转,获得不同波长的图像。滤光轮结构复杂,易发生机械故障,且不适用于辐射随时间变化的被测对象。因此,开发结构简洁、测温精度高的多光谱高温计是本文研究重点之一。
此外,数据处理一直是多光谱测温的难点。传统的多光谱测温的数据处理基于波长和发射率的假设模型,但在波长、温度和表面粗糙度等因素影响下,难以准确获得被测对象的发射率。在许多学者的研究中,假设发射率和波长之间存在函数关系[11-13]。因此,多光谱数据处理特别依赖于假设模型和真实发射率之间的一致性。发射率模型选取不当,将导致较大的温度反演误差[14]。
机器学习技术的兴起为研究者提供了新的思路。丛大成等[15]采用神经网络学习各种发射率模型生成的亮度温度样本,获得了真实温度和亮度温度之间的映射关系。孙晓刚等[16]将神经网络与遗传算法相结合,构建了一种新的多光谱测温方法。席剑辉等[17]建立了发射率未知条件下的基于径向基函数神经网络的多光谱测温方法,在钢的温度测量中具有较高精度。机器学习方法避免了发射率假设模型引入的误差,但需提前获得大量数据样本来训练神经网络,训练时间也相对较长。
近年来,研究者提出了多种无发射率假设模型或无需获得大量数据样本的多光谱测温方法。Wang等[18]提出了一种基于发射率波长曲线发展趋势来建立约束条件的方法,但需预先获得特定温度下被测对象的发射率。Xing等[19]将多波长温度计的数据处理问题转化为约束优化问题,并以梯度投影法和内部惩罚函数法进行求解,进而提出了一种广义逆矩阵外罚函数算法,实现了发射率和真实温度的同时反演[20],但该方法也需基于先验知识获得发射率的近似范围。
为降低多光谱测温中光学系统的硬件成本和系统复杂性,本文提出一种基于光场相机的光场多光谱成像技术,将光场相机与光谱滤波片结合[21],实现物体表面温度测量。此外,为实现无发射率假设模型的多光谱真实温度反演,本文提出了将不适定方程问题转化为多目标优化问题的方法。该方法基于最优化原理建立多目标函数并构造发射率约束条件[22],采用惩罚函数法求解。通过黑体炉标定实验,验证所提出的光场多光谱高温计硬件设计的可行性及多光谱数据处理的可靠性。
1 光场多光谱高温计
光场多光谱高温计系统如图1所示。在非聚焦型光场相机主透镜前,紧靠其放置1片滤波片阵列(滤波片阵列有6个光谱通道)。光场相机是在主透镜与图像传感器之间插入1片微透镜阵列(微透镜阵列位于主透镜的后焦平面处,图像传感器位于微透镜阵列的后焦平面处)的设备,可同时记录光线的方向和强度信息[23]。滤波片阵列平面(即主透镜平面)和图像传感器平面关于微透镜阵列共轭。高温被测对象的辐射被滤波片阵列分光,并由感光芯片记录光谱辐射,使每个像素点对应不同波长的辐射。
光场多光谱测温流程如图2所示。高温被测对象表面辐射的光线经滤波片阵列过滤,在主透镜的后焦平面(即微透镜阵列平面)形成中间光谱图像,再由微透镜阵列将光谱离散于图像传感器平面成像。由此,被测对象辐射被离散并采样。在图像传感器上,由于滤波片阵列平面和微透镜阵列形成的图像平面共轭,因此不同像素点对应的波长由入射光线通过的滤波片确定。单个微透镜下的图像记录了被测对象单个物点的多光谱辐射强度数据,整个微透镜平面则记录了被测对象整个面的多光谱辐射强度数据。因此,高温物体的多光谱图像可由单个相机的一次拍摄获得。
2 多光谱测温数据处理
在获取高温被测对象多光谱辐射信息的基础上,提出了基于多目标优化的多光谱温度反演方法。该方法基于参考温度的测温模型,根据辐射方程建立多目标函数,并设置发射率约束条件,采用惩罚函数法求解。
2.1 基于参考温度的测温模型
根据普朗克定律,对于n通道的多光谱高温计,第i通道接收到的辐射Vi可表示为:
$$ {V_i} = {A_i}\varepsilon ({\lambda _i},T)\frac{1}{{\lambda _i^5\left( {{e^{\frac{{{C_2}}}{{{\lambda _i}T}}}} - 1} \right)}}\;\;\;\;\; i = 1,2,...,n $$ (1) 式中:λi为第i通道的波长;Ai为设备相关的检定常数,与波长λi下的光学元件透过率、几何尺寸、探测器的光谱响应率及第一辐射常量有关;T为被测对象的真实温度;ε(λi, T )为被测对象在真实温度T和波长λi下的发射率;
$ {C_2} $ 为第二辐射常数。上式常以维恩近似重写得到下式:$$ {V_i} = {A_i}\varepsilon ({\lambda _i},T)\lambda _i^{ - 5}{e^{\frac{{ - {C_2}}}{{{\lambda _i}T}}}}\;\;\;\;\; i = 1,2,...,n $$ (2) 在参考温度T'下,第i通道接收到的黑体辐射信号Vi'为:
$$ {V'_i} = {A_i}\lambda _i^{ - 5}{e^{\frac{{ - {C_2}}}{{{\lambda _i}T'}}}}, \varepsilon ( {\lambda _i},T) = 1 $$ (3) 取式(2)和式(3)的比值,可得:
$$ \frac{{{V_i}}}{{{{V}'_i}}} = \varepsilon ({\lambda _i},T){e^{\frac{{ - {C_2}}}{{{\lambda _i}T}}}}{e^{\frac{{{C_2}}}{{{\lambda _i}T'}}}} $$ (4) 该模型仅需测量参考温度
$T' $ 下各通道的输出Vi,只要参考温度$ T' $ 稳定,不影响被测对象真实温度T和发射率ε(λi, T )的计算结果。参考温度模型简单易行,误差小,已经得到了广泛应用。从式(4)可以看出,基于已知的发射率ε(λi, T)和真实温度T可以很容易地计算出被测对象的辐射强度,但相应的物理反问题是一个涉及2个未知变量的不适定问题。因此,求解式(4)中的未知参数是多光谱测温数据处理的关键。本文采用多目标优化方法进行多光谱真实温度反演的求解。
2.2 建立多目标函数
在式(4)两边进行对数运算,可得:
$$ \ln \left( {\frac{{{V_i}}}{{V_i'}}} \right) - \frac{{{C_2}}}{{{\lambda _i}{T'}}} = \ln \left[ {\varepsilon ({\lambda _i},T)} \right] - \frac{{{C_2}}}{{{\lambda _i}T}} $$ (5) 令xi=ln[ε(λi, T )],Di=(C2/λiT')−ln (Vi/Vi'),各通道的反演温度Ti和理论真实温度E(Ti)可表示为:
$$ {{{T}}_i} = \frac{{{C_2}}}{{{\lambda _i}}}\frac{1}{{{x_i} + {D_i}}} $$ (6) $$ {{E}}\left( {{{{T}}_i}} \right) = \frac{1}{n}\sum\limits_{i = 1}^n {\frac{{{C_2}}}{{{\lambda _i}}}\frac{1}{{{x_i} + {D_i}}}} $$ (7) 被测对象在某一时刻的真实温度唯一,理论上各通道的反演温度应相等,但测量中的随机误差会导致各通道测量的温度不相等。根据误差理论,各通道测量的被测对象温度标准差越小,测量的可靠性越高,精度越高。因此,建立第一个目标函数如下:
$$ {{{F}}_1} = \min \sum\limits_{i = 1}^n {{{\left[ {{{{T}}_i} - {{E}}\left( {{{{T}}_i}} \right)} \right]}^2}} $$ (8) 在此多目标函数最优化问题中,以n个发射率的对数值为自变量,建立第一个子目标函数F1,继续构造其他子目标函数。对于F1,若有一个通道的测量温度与被测对象的真实温度有较大偏差,则由该通道温度求得的平均值也将与真实温度有较大偏差。为避免这种情况,提出第二个目标函数
$ {{\text{F}}_2} $ :$$ {{{F}}_2} = \min \sum\limits_{i = 1}^n {{{\left[ {{{{T}}_i} - \frac{1}{{n - 1}}\sum\limits_{j = 1,j \ne i}^n {{{{T}}_{{j}}}} } \right]}^2}} $$ (9) 从式(9)可以看出,各通道的温度不会影响其他通道温度的平均值,从而避免了平均值与真实温度偏差较大。
理论上,被测对象真实温度唯一,各通道反演温度相等,即它们之间的差为0:
$$ \begin{split}& {T_1} - {T_2} = {T_1} - {T_3} = \cdots = {T_1} - {T_n} = \\& {T_2} - {T_3} = \cdots = {T_2} - {T_n} = \cdots = {T_{n - 1}} - {T_n} = 0 \end{split} $$ (10) 因此,可以构造以下目标函数
$ {{\text{F}}_3} $ :$$ {{{F}}_3} = \min \sum\limits_{i = 1}^{n - 1} {\sum\limits_{j > i}^n {{{\left( {{{{T}}_i} - {{{T}}_{{j}}}} \right)}^2}} } $$ (11) 以上,针对多光谱测温的最优化问题构造了3个目标函数。发射率范围为[0, 1],即0≤ε(λi, T ) ≤ 1,则约束条件为xi < 0。
多光谱测温的多目标优化问题描述如下:
$$ \begin{split}& {{F}}(x) = \left[ {{{{F}}_1}(x),{{{F}}_2}(x),{{{F}}_3}(x)} \right] \\& {\rm{s}}.{\rm{t}}.\;\;\;\quad {x_i} < 0\qquad\; \;\;i = 1,2, \cdots ,n \\& \end{split} $$ (12) 这是一个标准多目标优化问题,可采用多种智能算法进行求解[24-25]。但是,对于真实温度反演问题,仅基于目标函数的值很难评估通过智能算法获得的每个帕累托解的优缺点。因此,本文采用线性加权方法求解多目标优化问题。根据目标函数的重要性,采用线性加权方法将式(12)转换为:
$$ \begin{split}& {{ F'}}(x) = \sum\limits_{i = 1}^3 {{\omega _i}} {{{F}}_i}(x) \\& {\rm{s}}.{\rm{t}}.\quad\;\;\;{x_i} < 0\qquad\;\;\; i = 1,2, \cdots ,n \\& \end{split} $$ (13) 式中:
${{ F'}}(x) $ 为单目标函数,ωi为权重。式(13)为典型的单目标优化问题。当式(14)成立时,式(13)的最优解是相应多目标优化问题的有效解。$$ \left\{ \begin{gathered} {\omega _i} > 0 \\ \sum\limits_{i = 1}^N {{\omega _i}} {\text{ = }}1{\text{ }}\quad\;\;\; i = 1,2, \cdots ,N \\ \end{gathered} \right.{\text{ }} $$ (14) 当各子目标函数的重要性未知时,对每个子目标函数作等权处理是一种相对合理的方法,即所有的权重ωi均取1/3。对于单目标优化问题(式(13)),引入惩罚函数法进行求解。当目标函数
${{ F'}}(x) $ 取得最优值时,可得到此时对应的基于多光谱测温模型的被测对象真实温度及发射率。3 实验验证
根据前文光场多光谱高温计的设计构想,搭建实验原型机。采用VOMMA公司的TM02–SY02–LF02光场相机搭建了六通道光场多光谱高温计。该高温计由1块六通道滤波片阵列、1个精密封装的微透镜阵列、1个6500万像素的CMOS传感器组成。滤波片阵列(2 × 3排列)由6个波长分别为470、500、530、575、620和670 nm,带宽为 ± 10 nm的滤波片加工组成。表1列出了相关详细技术参数。高温物体的多光谱图像可以通过单个光场相机一次拍摄获得。
表 1 光场多光谱高温计参数Table 1 Parameters of the light-field multi-spectral pyrometer参数 值 滤波片波长(λi ± 10 nm) 470, 500, 530, 575, 620, 670 微透镜阵列像素 800像素 × 600像素 微透镜阵列尺寸 25 mm × 18 mm 单个微透镜尺寸/µm 28 微透镜焦距/µm 510 传感器像素 7915像素 × 5436像素 传感器尺寸 22 mm × 15 mm 像元尺寸/µm 2.8 通过黑体炉标定实验评估了系统的性能。实验系统如图3所示,光场多光谱高温计对准黑体炉(温度范围为600~1500 ℃),将其光路聚焦至黑体炉腔底,调整距离使来自腔体的辐射充满视场。黑体炉温度越高,辐射能量越强,实际测量时,在1300~1400 ℃区间每20 ℃进行一次拍摄。黑体炉温度稳定后,以光场多光谱高温计记录此时的辐射强度,得到黑体炉的光场多光谱图像。
图4(a)为滤波片阵列和主透镜示意图,滤波片阵列由6个带通滤波片排列而成,紧靠主透镜前放置。图4(b)为光场多光谱原始图像,显示了黑体炉腔体辐射的二维图像。图4(c)为单个微透镜的放大图(即宏像素图像),蓝线为微透镜边缘。可以看到,由于在主透镜前放置了滤波片阵列,且主透镜与单个微透镜下的宏像素共轭,因此该宏像素图像便记录了一个物点的多光谱辐射强度。与传统多光谱高温计相比,相当于将传统多光谱高温计在一维方向的分光方式变为二维方向上的分光方式。
得到高温物点在不同波段下的辐射强度数据后,需对数据进行预处理。首先,进行微透镜中心标定,确定每个微透镜相对于图像传感器平面的位置。光场相机通过拍摄白板获得校准图像。在校准图像中,每个微透镜后仅有若干像素被照亮,使用加权质心算法即可基于这些像素得到精确的微透镜中心的亚像素位置。其次,对曝光时间进行校准。为充分发挥感光芯片的性能,拍摄时在不同温度下使用了不同的曝光时间。感光芯片接收到的辐射强度与曝光时间呈线性关系[26],需基于曝光时间对各通道的辐射强度进行校正。
基于预处理后的数据,采用多目标优化方法计算温度。将反演温度与黑体炉真实温度T进行对比,获得光场多光谱高温计的测量精度。在参考温度
$T' $ = 1300 ℃条件下,选取光场多光谱图像中22500个微透镜(对应黑体炉腔体中心的22500个物点)下的多光谱数据进行计算,绘制了T = 1320、1360、1400 ℃时黑体炉反演温度的二维误差分布,如图5所示。从图5可以看出,在黑体炉标定实验中,所提出的光场多光谱测温方法的测量误差小于1%。![]() 图 5 黑体炉的二维温度误差分布Fig. 5 Two-dimensional temperature error distribution of black-body furnace
图 5 黑体炉的二维温度误差分布Fig. 5 Two-dimensional temperature error distribution of black-body furnace4 结 论
1)本文提出了一种新颖的多光谱测温方法,使用1个光场相机和1个滤波片阵列,在1次拍摄中离散并记录了入射光线的光谱和强度。
2)在多光谱数据处理中,无需假设发射率模型,通过建立多目标函数并转化为单目标优化问题,采用惩罚函数法实现了温度反演计算。
3)在黑体炉标定实验中,光场多光谱测温方法测量误差小于1%,表明光场多光谱测温是一种准确、无损的2D温度测量方法。
将光场多光谱测温方法应用于高温部件温度测量实验时,需充分考虑高温燃气及环境辐射所引入的测量误差,合理选择滤波片波长,同时优化光场多光谱温度反演算法,进而提升热端部件的测量精度。
-
[1] 李周复.风洞试验手册[M].北京:航空工业出版社, 2015. Li Z F. Handbook of wind tunnel test[M]. Beijing:Aeronautics Industry Press, 2015.
[2] Burgsmüller W, Castan C, Kooi J W, et al. Recent developments in low-speed TPS-testing for engine integration drag and installed thrust reverser simulation[R]. Aerospace paper, 1992.
[3] Bousquet J M. Survey of engine integration testing in ONERA wind tunnels[R]. AIAA-2005-3705, 2005.
[4] 徐铁军, 郝卫东, 李聪, 等.气动院校准箱工作原理分析及TPS校准目标量的获得方法[J].流体力学实验与测量, 2004, 18(4):99-104. DOI: 10.3969/j.issn.1672-9897.2004.04.021 Xu T J, Hao W D, Li C, et al. Analysis of operative principles of calibration tank in CARIA and acquired methods of objective parameters in TPS calibration[J]. Experiments and Measurements in Fluid Mechanics, 2004, 18(4):99-104. DOI: 10.3969/j.issn.1672-9897.2004.04.021
[5] 芮伟, 易凡, 杜宁, 等. 2.4 m跨声速风洞TPS测控系统设计与实现[J].实验流体力学, 2008, 22(4):72-75. DOI: 10.3969/j.issn.1672-9897.2008.04.016 Rui W, Yi F, Du N, et al. Design and realization of TPS measurement and control system for 2.4 m transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(4):72-75. DOI: 10.3969/j.issn.1672-9897.2008.04.016
[6] 陶洋, 刘光远, 张兆, 等.高速风洞带动力模拟试验TPS短舱唇口设计[J].航空动力学报, 2013, 28(5):1081-1085. http://d.old.wanfangdata.com.cn/Periodical/hkdlxb201305016 Tao Y, Liu G Y, Zhang Z, et al. Engine nacelle lip design for high speed TPS wind tunnel tests[J]. Journal of Aerospace Power, 2013, 28(5):1081-1085. http://d.old.wanfangdata.com.cn/Periodical/hkdlxb201305016
[7] 章荣平, 王勋年, 黄勇, 等.低速风洞全模TPS试验空气桥的设计与优化[J].实验流体力学, 2012, 26(6):48-52. DOI: 10.3969/j.issn.1672-9897.2012.06.011 Zhang R P, Wang X N, Huang Y, et al. Design and optimization of the air bridge for low speed full-span TPS test[J]. Journal of Experiments in Fluid Mechanics, 2012, 26(6):48-52. DOI: 10.3969/j.issn.1672-9897.2012.06.011
[8] 章荣平, 王勋年, 黄勇.发动机动力模拟风洞试验中的空气桥技术[J].航空动力学报, 2015, 30(4):910-914. http://d.old.wanfangdata.com.cn/Periodical/hkdlxb201504018 Zhang R P, Wang X N, Huang Y. Air bridge technology for engine power simulate test in wind tunnel[J]. Journal of Aerospace Power, 2015, 30(4):910-914. http://d.old.wanfangdata.com.cn/Periodical/hkdlxb201504018
[9] Robinson C E. Evaluation of ejector-powered simulator at transonic Mach numbers[R]. AIAA-79-1165, 1979.
[10] 郝卫东.高速风洞发动机进/排气动力模拟试验技术[J].北京航空航天大学学报, 2005, 31(4):459-463. DOI: 10.3969/j.issn.1001-5965.2005.04.020 Hao W D. Simulate test technique for engine air intake and exhaust in high speed wind tunnel[J]. Journal of Beijing University of Aeronautics and Astronautics, 2005, 31(4):459-463. DOI: 10.3969/j.issn.1001-5965.2005.04.020
[11] 王勋年, 巫朝君, 陈洪, 等.战斗机推进系统模拟低速风洞试验技术研究[J].实验流体力学, 2011, 25(3):46-49. DOI: 10.3969/j.issn.1672-9897.2011.03.011 Wang X N, Wu C J, Chen H, et al. Investigation on test technique of fighters with propulsion simulation in low wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(3):46-49. DOI: 10.3969/j.issn.1672-9897.2011.03.011
[12] 郁新华, 陶于金, 张琳.飞翼布局无人机进/排气效应风洞试验研究[J].空气动力学学报, 2013, 31(4):494-497. Yu X H, Tao Y J, Zhang L. Wind tunnel experimental research on effect of air intake and exhaust on the aerodynamics of flying wing UAV[J]. Acta Aerodynamica Sinica, 2013, 31(4):494-497.
[13] Grellmann H W. B-2 aerodynamic design[R]. AIAA-90-1802, 1990.
[14] Smith C L, Riddle T R. Jet effects testing considerations for the next-generation long-range strike aircraft[R]. AIAA-2008-1621, 2008.
[15] 陈嵩禄, 云梦东, 刘日明, 等.飞机设计手册-动力装置系统设计[M].北京:航空工业出版社, 2006. [16] von Geyr H Frhr, Rossow C C. A correct thrust determination method for turbine powered simulators in wind tunnel testing[R]. AIAA-2005-3707, 2005.
[17] 塞登J, 戈德史密斯E L.进气道空气动力学[M].骆长天, 涂鼎立, 程大光, 等译.沈阳: 航空工业部第六〇一研究所, 1992.

 下载:
下载:






























计量
- 文章访问数: 232
- HTML全文浏览量: 94
- PDF下载量: 9






