
Visualization of shock wave in hypersonic flow using electric discharge
-
摘要: 基于气体放电辐射强度与气体密度的相关性,在高超声速脉冲风洞FD-20中搭建了气体放电流场显示系统,并分别以平板模型、平板-方块模型和简化进气道模型为试验模型,在来流马赫数Ma=12.16、来流静压p≈106Pa的流场条件下开展气体放电流场显示技术研究。在平板实验中,气体放电方法较准确地观测到了电极之间的平板前缘激波结构,与纹影技术测得激波角相差仅为0.21°。在平板-方块实验中,气体放电方法观测到了2个截面(对称面和远离对称面截面)的激波结构,对称面波系结构与纹影和数值计算所得结果基本一致,远离对称面截面的波系结构与数值计算结果基本一致。在简化进气道实验中,气体放电方法观测到了内流道激波交叉形成的菱形结构,且尺寸与数值计算结果相差较小,约为7.9%。这些实验结果表明,在高超声速脉冲风洞中,采用气体放电方法可以获得清晰准确的激波结构,不仅可进行分截面激波结构观测,还可对被模型遮挡的内部区域激波结构进行显示,而且特别适合用于局部复杂流动波系结构的观测。Abstract: Based on the relationship of the electric discharge radiation intensity and gas density, the electric discharge visualization system was set up in hypersonic impulse wind tunnel FD-20. Three different test models are employed to explore the practicability of electric discharge for visualization of hypersonic flow structures under the flow condition of mach number Ma=12.16 and static pressure p≈106Pa. The experimental models include a plate, a combination of a cube and a plate (labeled as plate-cube), and a simplified inlet. In the plate experiment, the shock wave between electrodes was accurately observed by the electric discharge and the shlieren respectively, and the two methods gave a merely 0.21° difference in the shock wave angle. In the plate-cube experiment, flow structures on two different slices were obtained by the electric discharge. Shock structures on the central plane slice are basically the same as those obtained by the schlieren and CFD, and shock structures on the slice far away from the central plane are also confirmed by CFD. In the simplified inlet experiment, a diamond shock cell was observed by the electric discharge in the internal flow region of the inlet. The measured size of the diamond shock cell is slightly different from the numerical result with a deviation of 7.9%. These results demonstrate that electric discharge can be used to visualize shock structures on different flow slices and the internal flow region in the hypersonic impulse wind tunnel, and is especially suitable for the observation of local complex flow structures.
-
Keywords:
- hypersonic flow /
- electric discharge /
- visualization /
- shock wave
-
0 引言
在超/高超声速流动中,激波是非常重要的流场结构。风洞实验中需要对激波结构进行实时观测,以确定超/高超声速流场是否建立及确认模型周围流场结构。
目前在超/高超声速风洞实验中观测流场激波结构的手段主要有基于气体折射率变化的纹影等光透射法、基于示踪粒子的NPLS等光散射法、基于示踪粒子的PLIF等荧光法及基于气体放电的发光法。广泛应用的纹影和阴影获得的流场波系结构一般是整个光学路径上气体密度变化量的叠加,难以测量三维激波结构及复杂流动区域进行分截面显示[1]。NPLS和PLIF等可对流场结构进行分截面观测,但需要在流场中播撒示踪粒子,用于高超声速复杂流动(特别是密度较低的流动),存在粒子跟随性问题[2-3]。基于气体放电的发光法是利用外电场作用下气体自持放电来显示流场结构,主要用于气体密度较低的试验流场显示,最为典型的就是辉光放电流场显示技术。从20世纪中期,研究者就开始尝试利用辉光放电技术来观测高超声速低密度风洞的试验流场结构,目前已成为高超声速低密度风洞中必备的实验技术之一,可实现高超声速低密度流场中波系结构的显示和边界层厚度的确定[4-10],但该方法主要集中用于风洞来流静压小于10Pa的流场。由于流场静压极低,辉光放电区域相对较大,能够进行大面积流场显示,但难以进行分截面流场波系结构的测量。
20世纪70年代起,国外进一步探索风洞来流静压较高条件下(约100Pa量级)的气体放电流场显示技术[11],日本这方面最为突出。Masatomi等人在高超声速脉冲风洞中采用气体放电的方法开展了大量的研究工作,通过调整电极位置获得了X-33模型流向和展向激波结构[12],并将该技术应用于模型周围温度分布研究[13]、激波/边界层干扰研究[14]、流线显示研究[15]和模型尾迹行为研究[16-17]中。Itoh等人采用气体放电的方法获得了圆柱/平板干扰区流场结构[18]。Jagadeesh等人[19]在HST2高超声速激波风洞中采用气体放电的方法获得了大钝锥模型周围流场激波结构。这些研究表明,气体放电可用于静压较高的高超声速风洞流场显示,且特别适合复杂流动的局部观测。
国内从20世纪70年代开始在高超声速低密度风洞中开展辉光放电流场显示技术研究,原航天部701所(现中国航天空气动力技术研究院)在FD-04和FD-05低密度风洞中首先建立了辉光放电流场显示技术,后将该技术推广应用到中国空气动力研究与发展中心的低密度风洞[20-22],但尚未见在流场静压较高的高超声速脉冲风洞中使用气体放电方法进行流场显示的报道。紧密结合高超声速实验局部复杂流场观测需求,本文在高超声速脉冲风洞中搭建了气体放电系统,并分别以平板模型、平板-方块模型和简化进气道模型为试验模型,进行了较高静压(100Pa量级)下气体放电流场显示技术研究。
1 气体放电系统与实验设备
1.1 气体放电原理与系统
气体放电就是在某一体积的气体流场中,施加一个高压电场,使气体中的自由电子和离子在外电场作用下获得加速,产生定向的跃迁运动,并与气体分子发生碰撞,又产生二次电子和离子,这些电子和离子是不稳定的,不断回到原来能级上去,当它们复合成中性分子时,将能量以光量子的形式释放出来[1]。
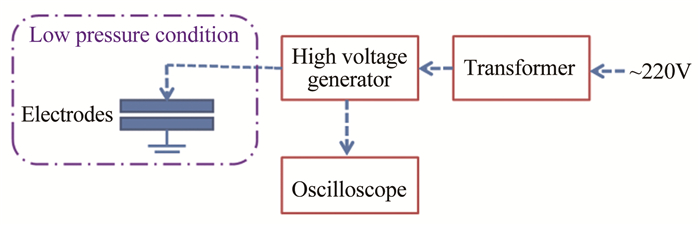
气体放电流场显示系统主要由放电系统和图像采集系统2部分组成,其中放电系统包括高压电源、放电电极和示波器。高压电源具有输出电压和输出频率调节功能,放电电极材质为铜,采用示波器记录放电波形。实验过程中采用高频相机拍摄放电图像。
1.2 实验设备
实验在中国航天空气动力技术研究院的高超声速脉冲风洞FD-20中进行[23],风洞实验来流参数为马赫数Ma=12.16、总压p0=16.8MPa、总温T0=1522K、静压p≈106Pa、单位雷诺Re=0.4×106,风洞有效运行时间约40ms。实验前试验段静压小于100Pa。
采用输出为正弦波的高压交流电源,放电峰值电压为1.68kV,放电频率为4.77kHz。
采用高频相机进行气体放电图像的采集,采集频率为3000Hz,曝光时间为1/3000μs,分辨率1024pixel×1024pixel。
为了确定放电参数,在低压环境下开展了放电效果影响实验,获得了放电电极形状、放电电压、放电频率和环境静压等因素对放电效果的影响,详细结果见文献[24]。基于低压环境放电实验结果,并结合模型的具体结构特点,确定了本文研究中3个模型所采用的放电电极形状、放电参数和相机拍摄参数等。
2 实验模型
3个模型共用1个底座和支杆,为了保证模型的强度,模型底座和支杆为钢制,由于气体放电实验需要在模型表面布置电极,模型的其他部分均由电绝缘材料制成。
前期的低压环境放电实验结果表明,放电电极形状影响放电区域的形状,放电电极位置决定放电区域的位置[24]。本文实验研究中根据不同模型的流场结构特点和观测区域选择合适的放电电极形状和电极对位置。
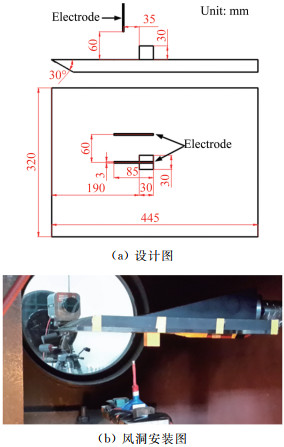
2.1 平板模型
平板模型前缘楔角为30°,宽320mm,长445mm。平板模型的放电电极为针-线电极,针电极垂直于模型表面,距模型表面60mm,线电极沿流向布置于模型中心线上,如图 3所示。
2.2 平板-方块模型
平板-方块模型为在平板模型中心线上距离前缘205mm的位置放置一个30mm×30mm×30mm的立方体。该模型的放电电极是针-线电极,与平板模型的电极布置方式类似,针电极垂直于模型表面,距模型表面60mm,线电极长85mm,宽3mm,沿流向布置于模型表面,通过调整电极对位置实现对中心截面(Z=0mm)和距中心60mm截面(Z=60mm) 2个位置激波结构的显示,如图 5所示。
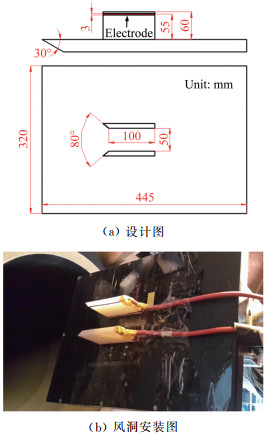
2.3 简化进气道模型
仿照侧压式进气道[25],设计了简化进气道模型,在该模型的2个侧立板中间区域可以产生与侧压式进气道类似的激波交叉-反射-交叉结构。
简化进气道模型的放电电极为线-线电极,电极布置在模型侧立板的内侧面顶部,距模型底面55mm,线电极长100mm,宽3mm,如图 6所示。
3 数值模拟计算
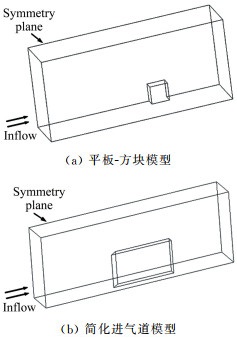
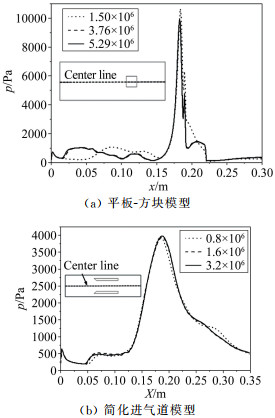
本文利用有限体积法对三维层流N-S方程进行离散求解。数值格式采用二阶守恒型TVD格式,网格分界面的物理量采用近似黎曼方法(HLLC)求解,配以Minmod限制器以抑制激波等物理间断面附近的非物理震荡和不损失远离间断面的数值精度。时间项采用二阶隐式伪时间步长法推进处理。本文所采用的数值计算方法适合用于求解高速可压缩流动,能够很好地避免求解强激波时出现非物理的红宝石(Carbuncle)现象,且在文献[26-28]中已得到验证。平板-方块模型和简化进气道模型的计算域如图 7所示,分别采用不同大小的网格开展流场计算,获得的模型中心线压力分布如图 8所示,对比不同网格计算获得的模型中心线压力分布可以看出,当网格数目增加到一定程度以后,数值计算结果不再随着网格数目的增加而改变,采用网格数目为376万(160万)的网格计算获得的平板-方块模型(简化进气道模型)流场信息是准确可靠的。
4 实验结果分析与验证
采用数值模拟计算和纹影仪获得的激波结构与气体放电方法获得的流场激波结构进行对比,验证采用气体放电方法获得的流场激波结构的正确性。简化进气道模型由于特殊的结构特点,无法使用纹影仪获得2个侧立板中间区域的流场波系结构,只采用数值模拟计算的方法对实验结果进行确认。
4.1 平板模型
图 9为平板模型的气体放电图像和纹影图像,在2幅图像中均能看到平板模型的前缘斜激波①和模型上方针电极引起的诱导激波②。以针电极外轮廓为基准,气体放电所得的前缘斜激波夹角为83.65°,纹影所得的前缘斜激波夹角为83.44°,差异较小,约0.21°,即2种方法获得的激波角基本一致,可见气体放电方法能够较准确显示高超声速脉冲风洞流场波系结构。此外,还可以看出气体放电区域基本集中在两电极之间的区域,使用气体放电方法未能获得纹影一样的全视场流动结构,这说明在气流静压相对较高(100Pa左右)时气体放电只能显示电极之间的流场结构,因此在风洞试验中需要根据流场显示需求进行电极的合理布置。
4.2 平板-方块模型
图 10为平板-方块模型的纹影图像和2个测量截面上的气体放电图像。图 10(c)所示中心截面的气体放电图像中,可以清晰地看到模型前缘斜激波①、针电极诱导的斜激波②、方块头部的弓形激波③和方块上游角区的分离激波④,通过气体放电方法获得的流动结构与纹影图像中的流动结构相似,激波形状与位置基本一致。
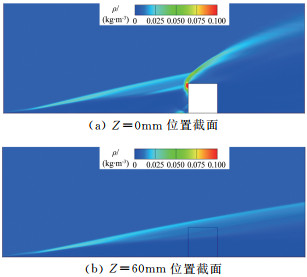
对比图 10(c)和(d) 2个不同截面上的气体放电图像,在Z=60mm截面的放电图像中,只有模型前缘斜激波①和针电极诱导的斜激波②,未见方块引起的弓形激波③和分离激波④。采用气体放电方法获得的2个截面上的激波结构,除针电极诱导的斜激波外,其他波系特征与图 11中数值模拟计算获得的2个截面上的激波结构类似,表明在高超声速脉冲风洞中采用气体放电方法可进行分截面激波结构显示。本次实验中对相距60mm的2个截面进行了激波结构的观测,如将观测截面的间距减小,增加观测截面,通过多个截面上的激波形状即可还原模型周围的三维激波结构。由于放电区域具有一定的宽度,2个观测截面的最小间距由放电区域的宽度决定,而放电区域的宽度受环境静压、电极宽度和放电参数等因素影响,因此不同观测截面的最小间距需要视具体实验参数而改变。
![]() 图 11 平板-方块模型激波结构(数值模拟计算结果,密度场)Fig. 11 Shock wave structure around the plate-cube model(Numerical simulation result, density distribution)
图 11 平板-方块模型激波结构(数值模拟计算结果,密度场)Fig. 11 Shock wave structure around the plate-cube model(Numerical simulation result, density distribution)4.3 简化进气道模型
图 12为气体放电方法获得的简化进气道模型激波结构与数值计算结果的对比,采用气体放电方法获得了模型侧立板中间区域的激波交叉-反射-交叉结构。以侧立板的长度作为尺寸参照,对数值模拟和实验获得的反射激波位置与Diamond shock cell的长度进行了测量,数值计算Diamond shock cell的长度为71.5mm,实验获得的长度为77.6mm,两者相差约6.1mm,以实验结果为基准,两者差异约7.9%,说明气体放电方法可以较准确显示内流场波系结构。
由于简化进气道模型的底板遮挡了纹影技术的光学路径,无法采用纹影技术进行模型2个侧立板中间区域激波结构的显示。采用气体放电流场显示技术成功获得了2个侧立板中间区域的流场激波结构,验证了使用气体放电流场显示技术可进行被模型遮挡区域激波结构显示。
5 结论
在高超声速脉冲风洞中搭建了气体放电流场显示系统,分别以平板模型、平板-方块模型和简化进气道模型为研究对象,开展了风洞验证实验。实验结果表明:
(1) 在高超声速脉冲风洞中,采用气体放电方法可以在放电区域获得清晰准确的流场波系结构,相对于纹影技术,气体放电方法具有观测光路简单,可进行高超声速流场分截面激波结构观测和被模型遮挡区域激波结构显示,但受放电区域大小限制,观测视场相对较小,因此比较适合进行局部复杂流动结构的观测;
(2) 本文发展的放电流场技术丰富了高超声速三维激波结构与高超声速进气道内流场激波结构的观测手段。
-
![]()
图 11 平板-方块模型激波结构(数值模拟计算结果,密度场)
Fig. 11 Shock wave structure around the plate-cube model(Numerical simulation result, density distribution)
-
[1] 李桂春.风洞试验光学测量方法[M].北京:国防工业出版社, 2008. Li G C. Optical instrumentation for wind tunnel testing[M]. Beijing:National Defense Industry Press, 2008.
[2] 易仕和, 陈植, 何霖, 等. NPLS技术及其在高速飞行器气动研究中的应用[J].实验流体力学, 2014, 28(1):1-11. http://www.syltlx.com/CN/abstract/abstract10444.shtml Yi S H, Chen Z, He L, et al. NPLS technique and its applications on aerodynamic investigations of high-speed vehicle[J]. Journal of Experiments in Fluid Mechanics, 2014, 28(1):1-11. http://www.syltlx.com/CN/abstract/abstract10444.shtml
[3] 曹春丽.双波长NO-PLIF测量运动激波反射前后温度场的初步研究[D].合肥: 中国科学技术大学, 2011. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2030025 Cao C L. Preliminary study on temperature measurement for moving shock reflection by two-wavelength NO-PLIF method[D]. Hefei: University of Science and Technology of China, 2011. http://www.wanfangdata.com.cn/details/detail.do?_type=degree&id=Y2030025
[4] Mccroskey W J, Bogdonoff S M, Mcdougall J G. An experimental model for the sharp flat plate in rarefied hypersonic flow[J]. AIAA Journal, 1966, 4(9):1580-1587. DOI: 10.2514/3.55283
[5] Horstman C C, Kussoy M I. Hypersonic viscous interaction on slender cones[R]. AIAA-68-2, 1968. http://www.researchgate.net/publication/23859060_Hypersonic_viscous_interaction_on_slender_cones
[6] Fisher S S, Bharathan D. Glow-discharge flow visualization in low-density free jets[J]. Journal of Spacecraft, 1973, 10(10):658-662. DOI: 10.2514/3.27786
[7] Moss J N, Price J M, Chun C H. Hypersonic rarefied flow about a compression corner-DSMC simulation and experiment[R]. AIAA-91-1313, 1991. http://www.researchgate.net/publication/23819094_Hypersonic_rarefied_flow_about_a_compression_corner_-_DSMC_simulation_and_experiment
[8] Alfyorov V I. Investigation of relaxation processes in flow about models in hypersonic wind tunnels of different types[R]. SPC-93-4044, 1993.
[9] Yuri Yermak. Investigation of temperature factor influence on control surface effectiveness in hypersonic flows with moderate interaction[R]. SPC-94-4003, 1994.
[10] Legge H. Experiments on a 70 degree blunted cone in rarefied hypersonic wind tunnel flow[R]. AIAA-95-2140, 1995. http://www.researchgate.net/publication/225013952_Experiments_on_a_70_Degree_Blunted_Cone_in_Rarefied_Hypersonic_Wind_Tunnel_Flow
[11] Kimura T, Nishio M, Fujita T, et al. Visualization of shock wave by electric discharge[J]. AIAA Journal, 1977, 15(5):611-612. DOI: 10.2514/3.60667
[12] Nishio M, Hagiwara T. Hypersonic flowfield analysis of X-33 model by the electric discharge method[J]. Journal of Spacecraft and Rockets, 1999, 36(6):784-787. DOI: 10.2514/2.3513
[13] Nishio M. Method for visualizing gas temperature distributions around hypersonic vehicles by using electric discharge[J]. AIAA Journal, 1993, 31(6):1170-1171. DOI: 10.2514/3.11748
[14] Nishio M. Methods for visualizing hypersonic shock-wave/boundary-layer interaction using electrical discharges[J]. AIAA Journal, 1996, 34(7):1464-1467. DOI: 10.2514/3.13254
[15] Nishio M. Methods for visualizing streamlines around hypersonic vehicles by using electrical discharges[J]. AIAA Journal, 1992, 30(6):1662-1663. DOI: 10.2514/3.11117
[16] Nishio M, Hagiwara T. Investigation of wake behind hypersonic vehicle by electric discharge method[R]. AIAA-98-1620, 1998. DOI: 10.2514/6.1998-1620
[17] Nishio M, Sezaki S, Nakamura H. Measurements of capsule wake stabilization times in hypersonic gun tunnel[J]. AIAA Journal, 2004, 42(1):56-60. DOI: 10.2514/1.9030
[18] Itoh H, Ishida T, Miyoshi Y, et al. Glow discharge visualization of hypersonic separated flow past cylinder/plate juncture[R]. AIAA-2014-3282, 2014. DOI: 10.2514/6.2014-3282
[19] Jagadeesh G, Sun M, Nagashetty K, et al. Experimental investigations of test gas effects on the hypersonic flow field around large angle blunt cone in shock tunnel[R]. AIAA-2001-0305, 2001.
[20] 倪刚.辉光放电显示低密度流场[R].航天部七零一所, 1986. [21] 李明, 廖俊必, 曾学军, 等.风洞气动热试验外推关联参数初步研究[J].空气动力学学报, 2010, 28(5):513-517. DOI: 10.3969/j.issn.0258-1825.2010.05.006 Li M, Liao J B, Zen X J, et al. Preliminary study on correlative parameters of extrapolation-to-flight of aerodynamic heating from wind tunnels[J]. Acta Aerodynamica Sinica, 2010, 28(5):513-517. DOI: 10.3969/j.issn.0258-1825.2010.05.006
[22] 梁杰, 阎超, 杨彦广, 等.过渡区侧向喷流干扰的并行DSMC数值模拟研究[J].宇航学报, 2011, 32(5):1012-1018. DOI: 10.3873/j.issn.1000-1328.2011.05.008 Liang J, Yan C, Yang Y G, et al. Parallel DSMC simulation of lateral jet interactionin rarefied transitional region[J]. Journal of Astronautics, 2011, 32(5):1012-1018. DOI: 10.3873/j.issn.1000-1328.2011.05.008
[23] Han S G, Wen S, Wu C H, et al. Global heat-flux measurements using phosphor thermography technique in gun tunnel[R]. AIAA-2015-3517, 2015. DOI: 10.2514/6.2015-3517
[24] Sha X G, Yuan M L, Wen S, et al. Glow discharge visualization of shock wave in hypersonic gun tunnel[C]. ASV14-CG-03, The 14th Asian Symposium on Visualization, Beijing, 2017.
[25] 金志光.超燃冲压发动机高超侧压式进气道设计方法研究[D].南京: 南京航空航天大学, 2006. Jin Z G. Design methodology investigation of three-dimensional sidewall compression scramjet inlet[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2006.
[26] Lu H B, Yue L J, Xiao Y B, et al. Interaction of isentropic compression waves with a bow shock[J]. AIAA Jounal, 2013, 51(10):2474-2484. DOI: 10.2514/1.J052373
[27] Lu H B, Yue L J, and Chang X Y. Flow characteristics of hypersonic inlets with different cowl-lip blunting methods[J]. Sci China-Phys Mech Astron, 2014, 57(4):741-752. DOI: 10.1007/s11433-013-5285-0
[28] Yue L J, Lu H B, Xu X, et al. Aerothermal characteristics of bleed slot in hypersonic flows[J]. Sci China-Phys Mech Astron, 2015, 58(10):1-14. DOI: 10.1007/s11433-015-5698-z
-
期刊类型引用(11)
1. 王宇辰,胡应交. 结冰试验云雾场参数与冰形测量技术研究综述. 气动研究与试验. 2025(01): 1-8 .  百度学术
百度学术
2. 曾昊,王峰,孙超. 液滴结冰研究中的光学测量方法. 力学学报. 2025(02): 316-334 . 百度学术
3. 钟富豪,刘森云,刘秀芳,代欣波,陈佳军,苗庆硕,易贤,侯予. 机翼混合相冰晶结冰现象的数值研究. 西安交通大学学报. 2024(10): 168-177 . 百度学术
4. 张丽芬,赵建辉,余邦拓,吕亚国,刘振侠. 旋转叶片通道内冰晶运动和融化数值研究. 西北工业大学学报. 2024(06): 987-995 . 百度学术
5. 马乙楗,柴得林,王强,易贤,余放. 基于蒙特卡洛方法的冰晶撞击特性计算. 南京航空航天大学学报. 2023(02): 291-301 . 百度学术
6. 马乙楗,柴得林,易贤,屈经国,王强. 考虑侵蚀效应的冰晶/混合相结冰计算方法. 航空学报. 2023(15): 276-286 . 百度学术
7. 陈佳军,刘秀芳,钟富豪,苗庆硕,郑勉,魏震,侯予. 航空发动机内冰晶的融化特性和积冰特性(英文). Transactions of Nanjing University of Aeronautics and Astronautics. 2023(06): 653-662 . 百度学术
8. 魏震,刘秀芳,钟富豪,陈佳军,苗庆硕,侯予. 微小冰晶粒子融化特性可视化实验. 航空学报. 2023(S2): 314-322 . 百度学术
9. 郭向东,胡站伟,丁亮,易贤,张平涛. 大型结冰风洞中冰晶热/力平衡特性数值研究. 航空动力学报. 2022(03): 478-491 . 百度学术
10. 孟宣市,惠伟伟,易贤,蔡晋生,李华星. AC-SDBD等离子体激励防/除冰研究现状与展望. 空气动力学学报. 2022(02): 31-49 . 百度学术
11. 黄平,卜雪琴,刘一鸣,林贵平,杨坤. 混合相/冰晶条件下的结冰研究综述. 航空学报. 2022(05): 120-138 . 百度学术
其他类型引用(2)
 下载:
下载:






计量
- 文章访问数: 280
- HTML全文浏览量: 119
- PDF下载量: 23
- 被引次数: 13






