

The design of a 3-DOF robot arm used forcaptive trajectory simulation in wind tunnel test
-
摘要: 设计了用于FL-12风洞捕获轨迹试验的三自由度转角头装置,该装置为机电一体化设备。介绍了三自由度转角头装置的结构设计,控制系统设计,驱动元件的选型计算及校核,并对装置进行了静力学与动力学分析以验证设计结果。结果表明,和现有装置相比,该三自由度转角头在俯仰和偏航方向的载荷能力均由100N·m提升至250N·m,可控制精度由0.1°提升至0.05°,在滚转方向的载荷能力由10N·m提升至20N·m,可控制精度由0.1°提升至0.05°。通过对试验装置风洞适用性的研究,在设计中对驱动元件及线缆的结构、整流装置的外形、装置总体尺寸等进行了优化,改善了现有设备线缆外露,外形整流性能较差以及风洞堵塞比较大等问题。Abstract: A 3-DOF robot arm design is presented for the Captive Trajectory Simulation (CTS) test in the FL-12 wind tunnel. It is an integrated mechatronics device. The paper introduces its transmission principle design, physical design, control system design, drive element selection calculation and verification, then verifies the design results with dynamical and static mechanics analysis. The results show that the device improves the load in pitch and yaw from 100Nm to 250Nm with control precision from 0.1°to 0.05°, and also improves the load in roll from 10Nm to 20Nm with control precision from 0.1°to 0.05°.The structure of drive element and cable, fairing configuration, overall dimension are optimized to make the device more suitable for the wind tunnel test.
-
Key words:
- robot arm /
- strength /
- finite element analysis /
- dynamics
-
表 1 三自由度转角头装置总体技术指标
Table 1. 3-DOF robot arm technical specification
项目 现有能力 设计要求 俯仰 载荷 100N·m 250N·m 精度 0.1° 0.05° 速度 10°/s 4°/s 角度范围 ±45° ±45° 偏航 载荷 100N·m 250N·m 精度 0.1° 0.05° 速度 10°/s 4°/s 角度范围 ±45° ±45° 滚转 载荷 10N·m 20N·m 精度 0.1° 0.05° 速度 10°/s 10°/s 角度范围 ±180° ±180° 重量 \ 60kg 堵塞比 \ 1.2%  下载: 导出CSV
下载: 导出CSV
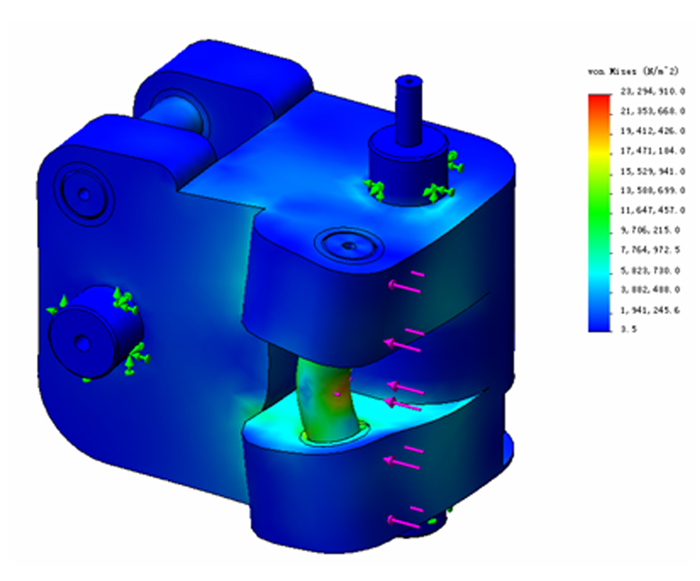
表 2 选用材料力学性能参数
Table 2. Mechanical properties of used material
材料 屈服强度/MPa 泊松比 密度/(kg·m-3) 7075-T6 5.05×102 0.33 2.81×103 30CrMnSiA 8.35×102 0.28 7.25×103
下载: 导出CSV
表 3 三自由度转角头设计结果
Table 3. 3-DOF robot arm design result
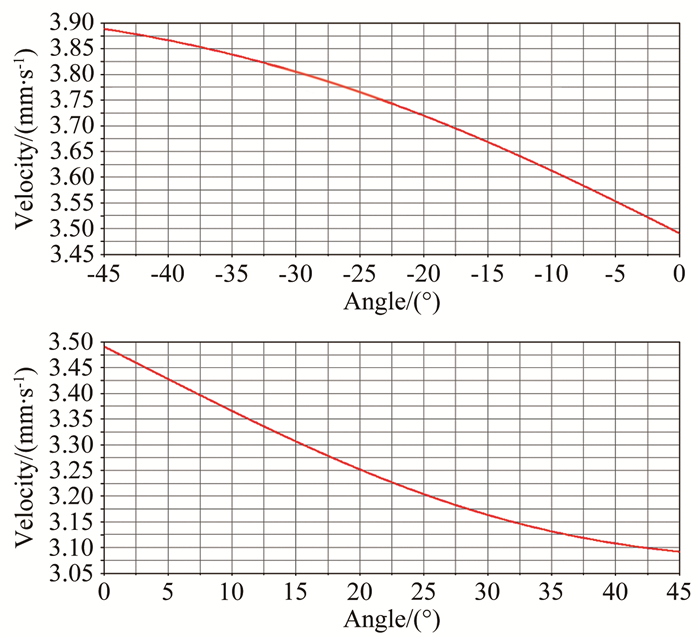
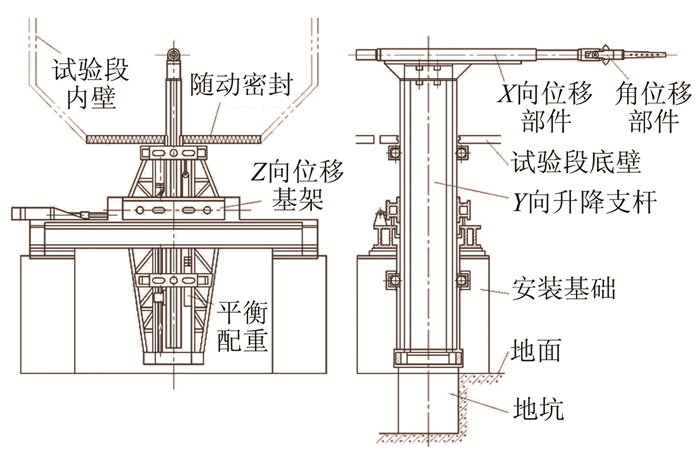
项目 现有能力 设计要求 设计结果 俯仰 载荷 100N·m 250N·m 306N·m 精度 0.1° 0.05° 0.016° 速度 10°/s 4°/s 4.56°/s 偏航 载荷 100N·m 250N·m 306N·m 精度 0.1° 0.05° 0.016° 速度 10°/s 4°/s 4.56°/s 滚转 载荷 10N·m 20N·m 23.5N·m 精度 0.1° 0.05° 0.0045° 速度 10°/s 10°/s 262°/s 重量 \ 60kg 56kg 尺寸/mm 1070×295×295 \ 1140×Φ210 堵塞比 \ 1.2% 1.12%
下载: 导出CSV
-
[1] Andrew G. Design & development of a new captive trajectory simulation model support system[R]. AIAA-99-2165, 1999. [2] Navair A C, Md P R. Lessons learned in 30 years of store sparation testing[R]. AIAA-2009-0098, 2009. [3] Carter R, Lind R. Trajectory optimization for guided store separation[R]. AIAA-2012-4686, 2012. [4] Veazey D T, Hopf J C. Comparison of aero dynamic data obtained in the Arnold Engineering Development Center wind tunnels 4T and 16T[R]. AIAA-1998-2874, 1998. [5] Coulton D G. Recent developments in data acquisition and control systems at the aircraft research association limited[C]. IEEE Instrumentation in Aerospace Simulation Facilities, 1991. [6] Garcon F. Recent developments in captive trajectory systems of the ONERA modane wind tunnels[R]. AIAA-2001-0579, 2001. [7] 黄叙辉, 庞旭东. 1.2米跨超声速风洞新型捕获轨迹系统研制[J].实验流体力学, 2008, 22(6):95-98. http://www.syltlx.com/CN/abstract/abstract9619.shtmlHuang X H, Pang X D. Development of a new captive trajectory simulation system in the 1.2m transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(6):95-98. http://www.syltlx.com/CN/abstract/abstract9619.shtml [8] 黄叙辉, 罗新福. FL-24风洞新型捕获轨迹系统设计与发展[J].空气动力学学报, 2008, 30(6):145-149. http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX200802002.htmHuang X H, Luo X F. Design & development of a new captive trajectory simulation system in FL-24 wind tunnel[J]. Acta Aerodynamica Sinica, 2008, 30(6):145-149. http://www.cnki.com.cn/Article/CJFDTOTAL-KQDX200802002.htm [9] 崔晓春, 邢汉奇, 张然, 等. FL-2风洞CTS实验技术[C].第一届近代实验空气动力学会议论文集, 2007. [10] 陈万华, 王超琪.某风洞主体结构的有限元分析[J].实验流体力学, 2005, 19(3):90-93. http://www.syltlx.com/CN/abstract/abstract9407.shtmlChen W H, Wang C Q. Finite element analysis on main body of a wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2005, 19(3):90-93. http://www.syltlx.com/CN/abstract/abstract9407.shtml [11] 中国人民解放军总装备部军事训练教材编辑委员会.高低速风洞气动与结构设计[M].北京:国防工业出版社, 2003. -




 点击查看大图
点击查看大图
图(18) / 表(3)
计量
- 文章访问数: 157
- HTML全文浏览量: 107
- PDF下载量: 16
- 被引次数: 0






